9-62 Manual # 42-02-2223
Reference
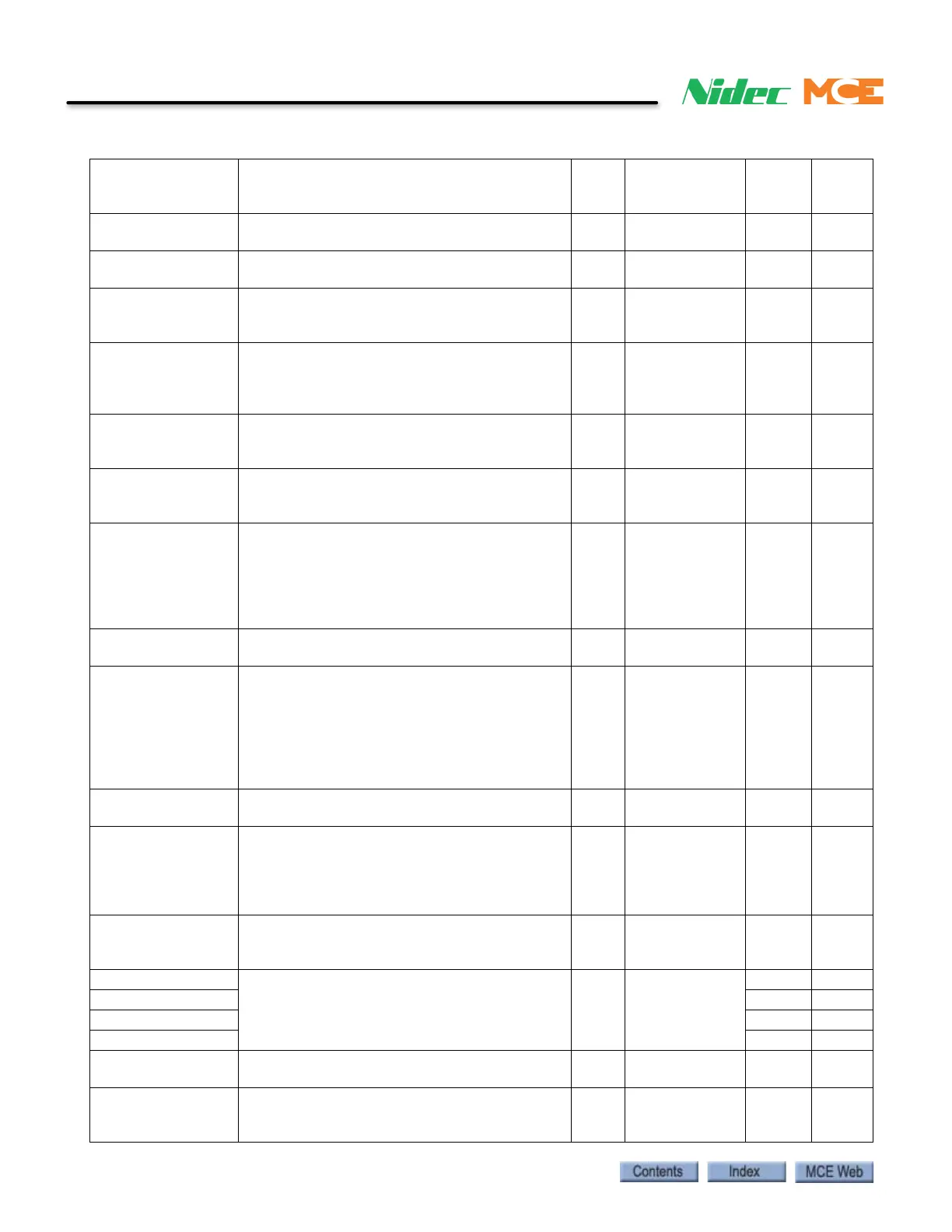
RAMP DOWN EN
SRC
Ramp Down Enable Source none -- external tb
-- run logic
-- serial
EXTER-
NAL TB
RUN
LOGIC
BRK PICK FLT ENA Brake Pick Fault Enable none -- disable
-- enable
DISABLE DIS-
ABLE
BRK HOLD FLT ENA Brake Hold Fault Enable none -- disable
-- enable
DISABLE DIS-
ABLE
EXT TORQ CMD SRC External Torque Command Source none -- none
-- serial
-- analog input
NONE NONE
DIR CONFIRM Direction Confirm: When enabled, allows con-
firmation of polarity of initial analog speed
command via Run UP or Run Down logic
inputs.
none -- disable
-- enable
DISABLE DIS-
ABLE
S-CURVE ABORT Addresses how S-curve speed reference gen-
erator handles reduction in speed command
before S-curve generator reaches target speed
none -- disable
-- enable
DISABLE DIS-
ABLE
I-REG INNER LOOP Current regulator inner loop. Disables/enables
current regulator inner loop function. Used to
enhance current loop performance.
None - disable
- enabled low
- enabled high
Enabled
low
Enabled
low
ENCODER FAULT Allows temporary disabling of Encoder Fault
during initial start up when motor model is not
clearly defined. If disabled, drive will display
“Encoder Fault OFF” every time RUN command
is removed. Enable after A5 motor parameters
established.
none -- disable
-- enable
ENABLE ENABLE
STOPPING MODE Multi-step stopping mode selection none -- immediate
-- ramp to stop
IMMEDI-
ATE
IMME-
DIATE
MOTOR OVRLD SEL Motor overload select. Select action to be
taken by drive when declaring user selectable
Motor Overload.
Alarm only.
Flt immediate: declare fault, turn off output.
Fault at stop: Delay declaring fault until run
command removed.
None - alarm
- flt immediate
- fault at stop
ALARM Fault at
stop
AUTO STOP Auto stop Function Enable none -- disable
-- enable
DISABLE DIS-
ABLE
SERIAL MODE Select the serial protocol none -- none
-- Mode 1
-- Mode 2
-- Mode 2
-- Mode 2 test
NONE NONE
SER2 FLT Mode Select the fault response to be used when run-
ning serial mode 2
none -- Immediate
-- Run remove
-- Rescue
IMMEDI-
ATE
IMME-
DIATE
MLT-SPD TO DLY1 Multi-step speed command delay. Assigns
multi-step speed command to recognition
delay timer x as defined by MSPD DELAY x (A!)
parameter.
none None
-mspd 1
through mspd15
MLT-SPD TO DLY2
MLT-SPD TO DLY3
MLT-SPD TO DLY4
ENCODER SELECT Magnetek only. Presently, only EnDat absolute
encoder is available.
None Endat abslute Endat
abslute
Endat
abslute
ENGR PARM LOCK Magnetek personnel only. Used to lock out
parameters that should only be changed by
Magnetek engineers.
Non - locked
- unlocked
Locked Locked
Table 10. Quattro PM Elevator Drive, iControl