41
Settings
5. Settings
Digitax SF Instruction Manual
5. Parameters
5. Parameters
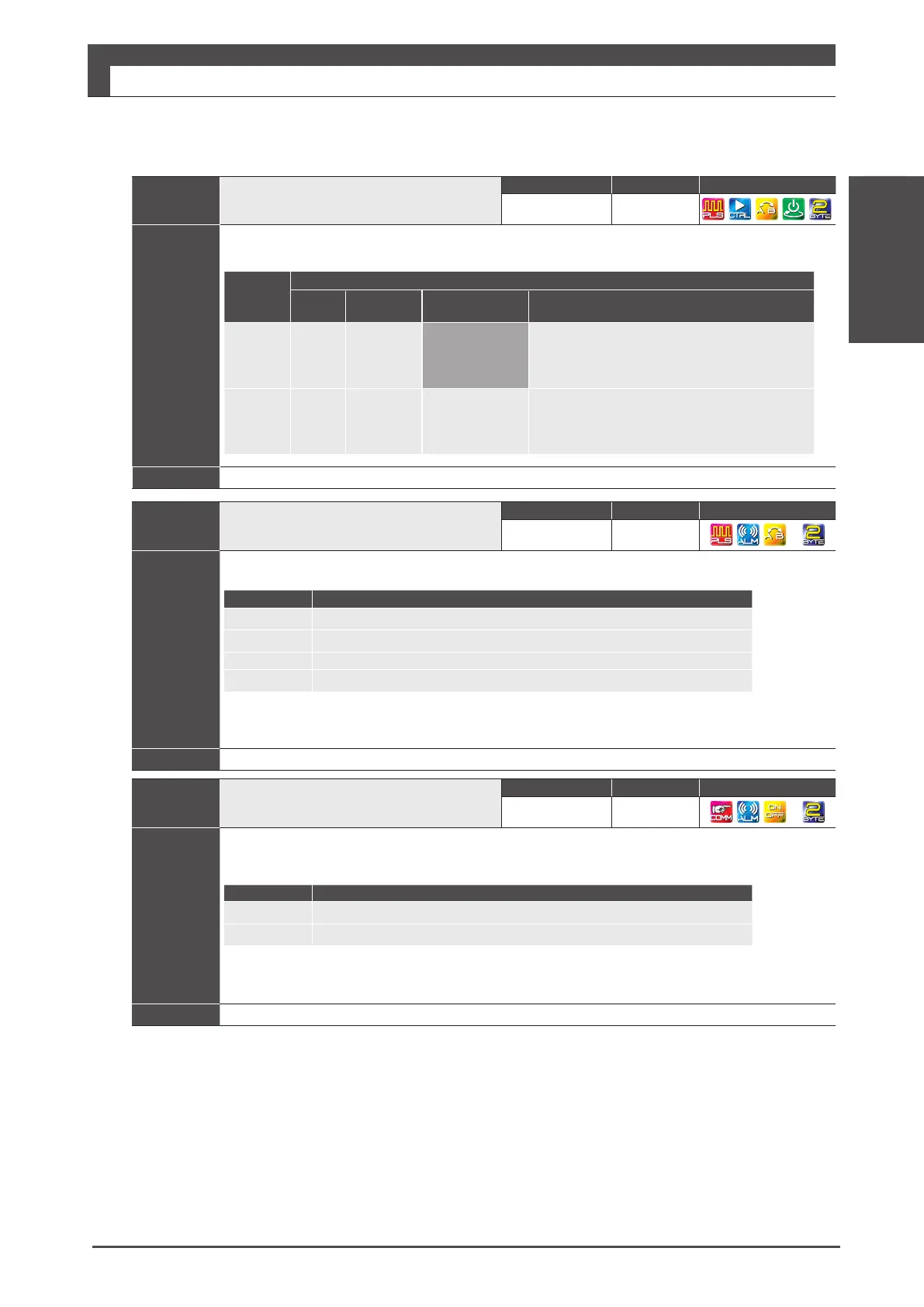
No. 64.0
Positioning complete:
Determination method
Settings Default Characteristics
0, 1 0
Function
Use
Select one of two methods to output the Positioning Complete signal.
Settings
Signal Output Conditions
Position
Error
Speed
Pulse Train
command input
Parameter settings
0 ○ ○ -
Detection criteria
- Range(68.0)
- Speed(69.0)
1 ○ ○ ○
Detection criteria
- Range(68.0)
- Speed(69.0)
- command input(70.0)
Related To No. 68.0, No. 69.0, No. 70.0, No. 71.0
No. 65.0
Position error detection:
Select switch
Settings Default Characteristics
0 to 3 1
Function
Use
Specify what to output when excessive position error is detected.
Settings Output selection
0 No detect (No output)
1 Alarm output
2 Warning output
3 Alarm and Warning output
When using Torque command limit, select 0 (No output) so that an alarm will not occur in a torque
limit state.
Related To No. 87.0, No. 89.0, No. 363.0, No. 365.0
No. 65.1
Speed error detection:
Enable switch
Settings Default Characteristics
0, 1 1
Function
Use
Enable/Disable Speed Error Detection.
Settings Speed error detection
0 Disable
1 Enable
When using Torque command limit, select “Disable” so that an alarm will not occur during limiting.
Related To No. 90.0, No. 91.0
-
-

 Loading...
Loading...
