33
Digitax SF Instruction Manual
Tuning
7
7. Tuning
3. Tuning Parameters
3. Tuning Parameters
Function
This parameter will improve the responsiveness at a low gains setting�
Set the Feed Forward Compensation Rate (velocity) with respect to Control Gain
1 (115�0) for Position Control Mode�
Using this parameter is eective to shorten the settling time�
Parameter
117.0
Default:
10,000 [0�01% ]
Setting range: 0–15,000
Remark
Adjust this item after setting the following:
Control Gain Set
(113�0)
Control Level (114�0)
Control Gain 1 (115�0)
Control Gain 2 (116�0)
Guideline for Tuning
If the inertia ratio is right, setting this parameter to 10,000 will not cause overshooting
nor undershooting�
Tuning Tip
・Set the following before adjusting this parameter:
Inertia ratio (102�0), Control gain set (113�0), Control level (114�0), Control Gain 1
(115�0), and Control Gain 2 (116)
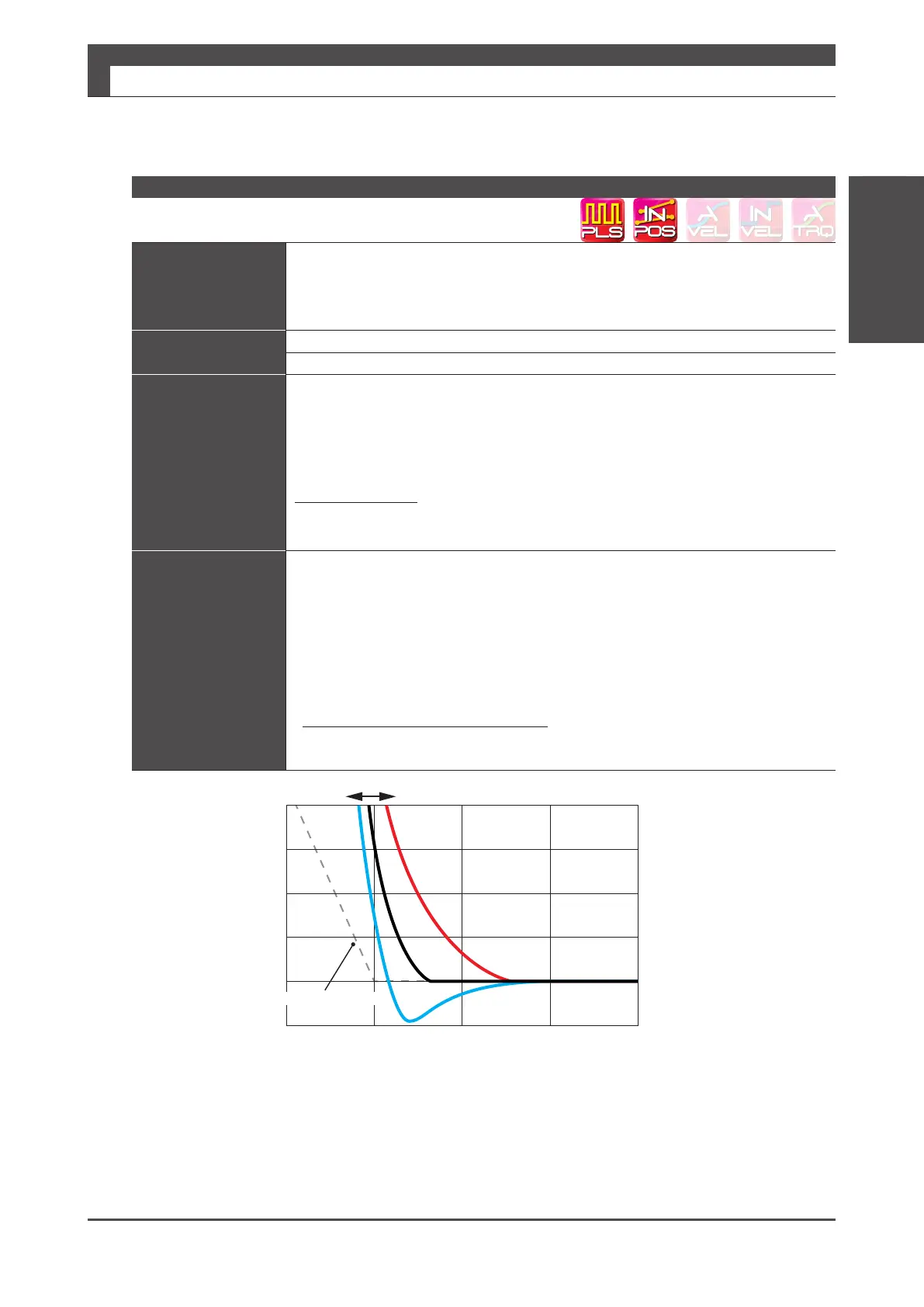
・Setting this parameter too low will result in undershooting. Target the value which
would make the settling time shorter�
・Too high a value of this parameter will result in overshooting. Set relatively a moderate
value�
Inertia condition Coarse tuning amount
1: increment by 10
2: increment by 100
Differences in Position Error
Convergence
Position Control Mode: Gain FF Compensation 1
Velocity command value
Position
Error
High Low

 Loading...
Loading...
