35
Digitax SF Instruction Manual
Tuning
7
7. Tuning
3. Tuning Parameters
3. Tuning Parameters
Function
Set the Integral Gain�
Increasing the integral gain will improve poor convergence due to friction and load
error.
fluctuation at settling and reduce the position
This will result in rigid and sensitive motions�
Parameter
119.0
Position Control
Mode
Default: 160 [rad/s]
Setting range: 45–5,000
Parameter
133.0
Velocity Control
Mode
Default: 300 [rad/s]
Setting range: 45–5,000
Remark
This parameter will reset to the default if the Control Gain Set is changed�
Too high an integral gain will cause noise� Adjust the value within the range of no noise
to achieve your desired responsiveness�
Tuning Tip
Adjust the integral gain after setting the control level (or adjust Control Gain 1 and 2
each) and FF compensation�
Noise Solutions
① Use Torque command lter: Notch lter
(such as 160�1)
② Decrease the value of Integral Gain�
If noise occurs, decrease the setting of this parameter or apply a torque command notch
lter�
Page 42 Torque Command Notch Filter
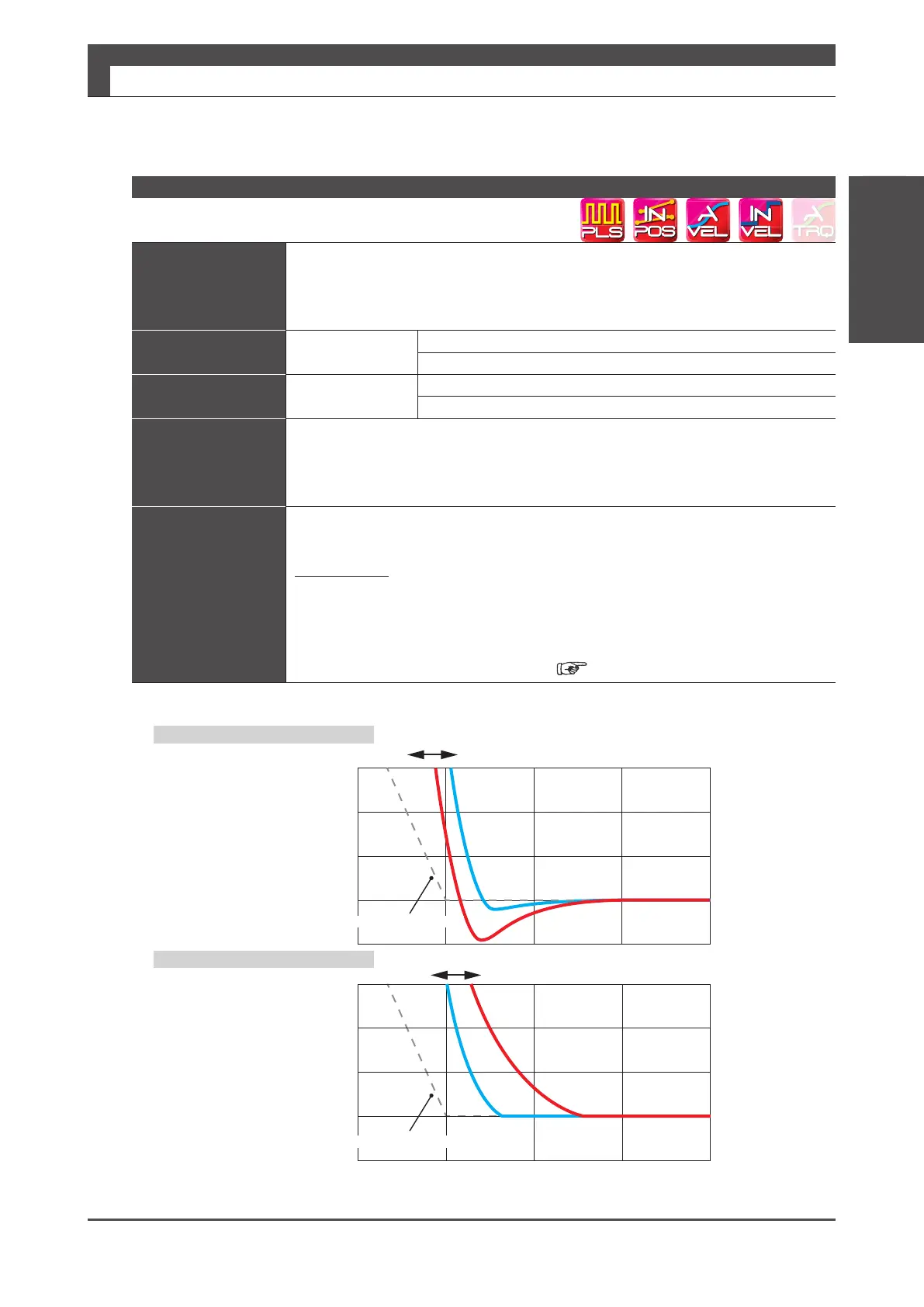
Differences in Position Error Convergence
Integral Gain
Velocity command value
Position
error
Velocity command value
Position
error
High Low
High Low
Overshooting Case
Undershooting Case

 Loading...
Loading...
