30
Digitax SF Instruction Manual
7. Tuning
3. Tuning Parameters
Function
Increasing this parameter value will reduce the position error after the command
becomes zero� Increase when the convergence of the position error at settling is not
good�
Parameter
115.0
Default: 50 [rad/s]
Setting range: 5–1,000
Remark
Select a value no higher than Position Control Mode: Control Gain 2
(116�0)�
Set a value smaller than the value of Control Gain 2 (116�0)�
Making a change to any of the following will also change other tuning parameters
(such as Control Gain 2) to the prearranged parameter set all at once�
• Control Gain Set(113�0)
• Inertia conditions(113�1)
• Control Level(114�0)
Tuning Tip
Increasing this parameter setting will improve the settling time in cases when increasing
the control gain set or control level does not resolve poor convergence of position
error, or noise is too much that the control gain set or control level cannot be
increased�
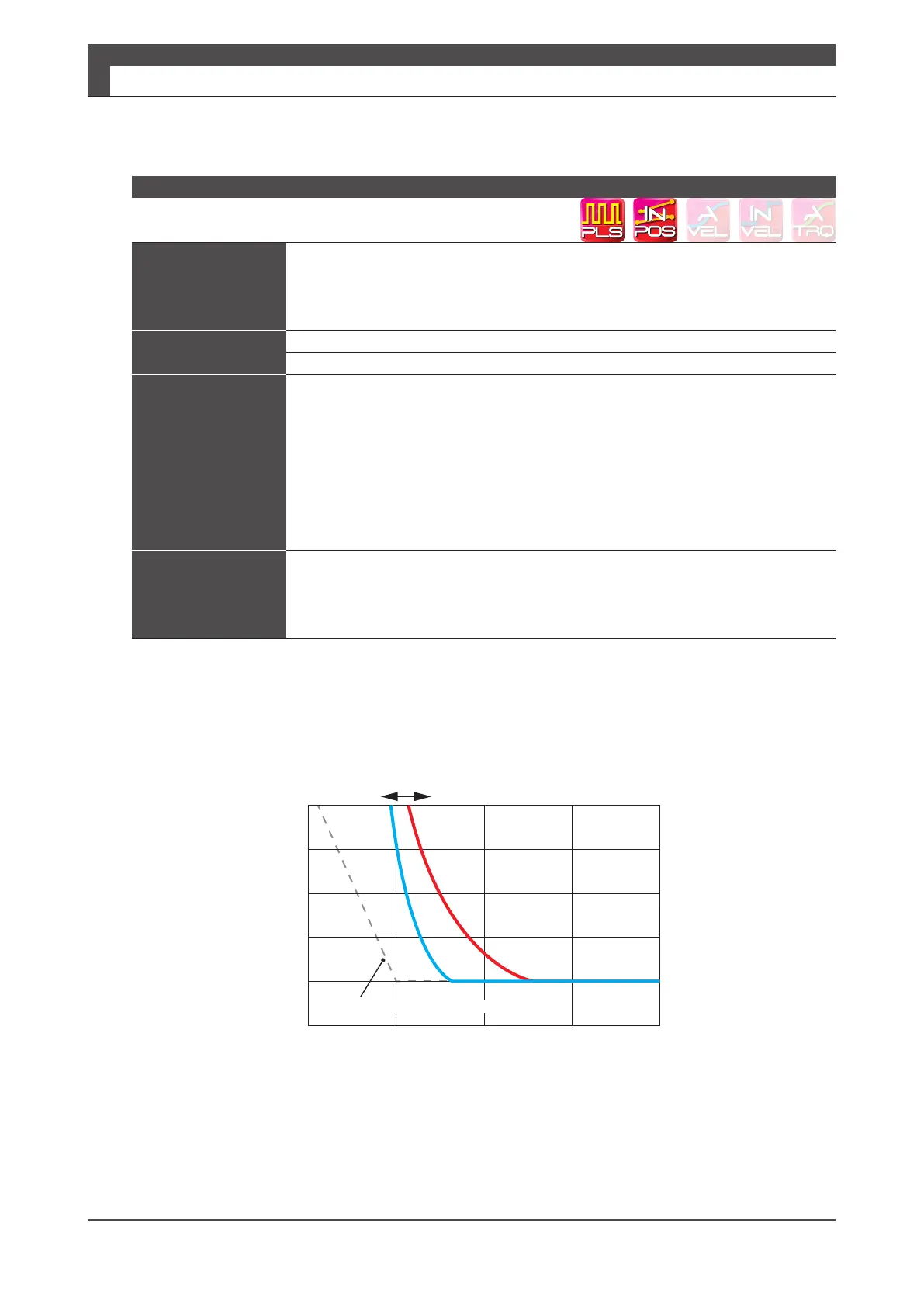
t
Differences in Position Error Convergence
Position Control Mode: Control Gain 1
High Low
Velocity command value
Position
error