40
[dB]
76.0
85.0
359.0
[-]
79.0
86.0
T[s]
N
F=N/T[Hz]
74.0
83.0
357.0
F[Hz]
74.0
83.0
357.0
Digitax SF Instruction Manual
7. Tuning
3. Tuning Parameters
Function
Use this lter, if the machine end point is still vibrating even after applying a notch lter
in addition to sucient tuning and a smoothing lter�
This lter has vibration suppression eect on mechanical systems where the vibrations
don
’
t appear in the torque output waveform� It has exibility of changing the gain setting
in a range higher than notch frequency�
Use this filter when it's expected that using a notch filter will reduce the position
error�
Remark
Increasing the high frequency gain too much may result in noise�
Decreasing the high frequency gain too much will tend to cause position error trip.
Set this filter within the acceptable range�
Tuning Tip
Check the following before applying the lter
・The command from the host controller is reasonable
・The equipment is installed rmly and properly�
・The gain parameters such as inertia ratio are properly set�
・The command smoothing lter 2 and 1 are set�
・The integral gain has been decreased and vibrations are unlikely to occur�
error,
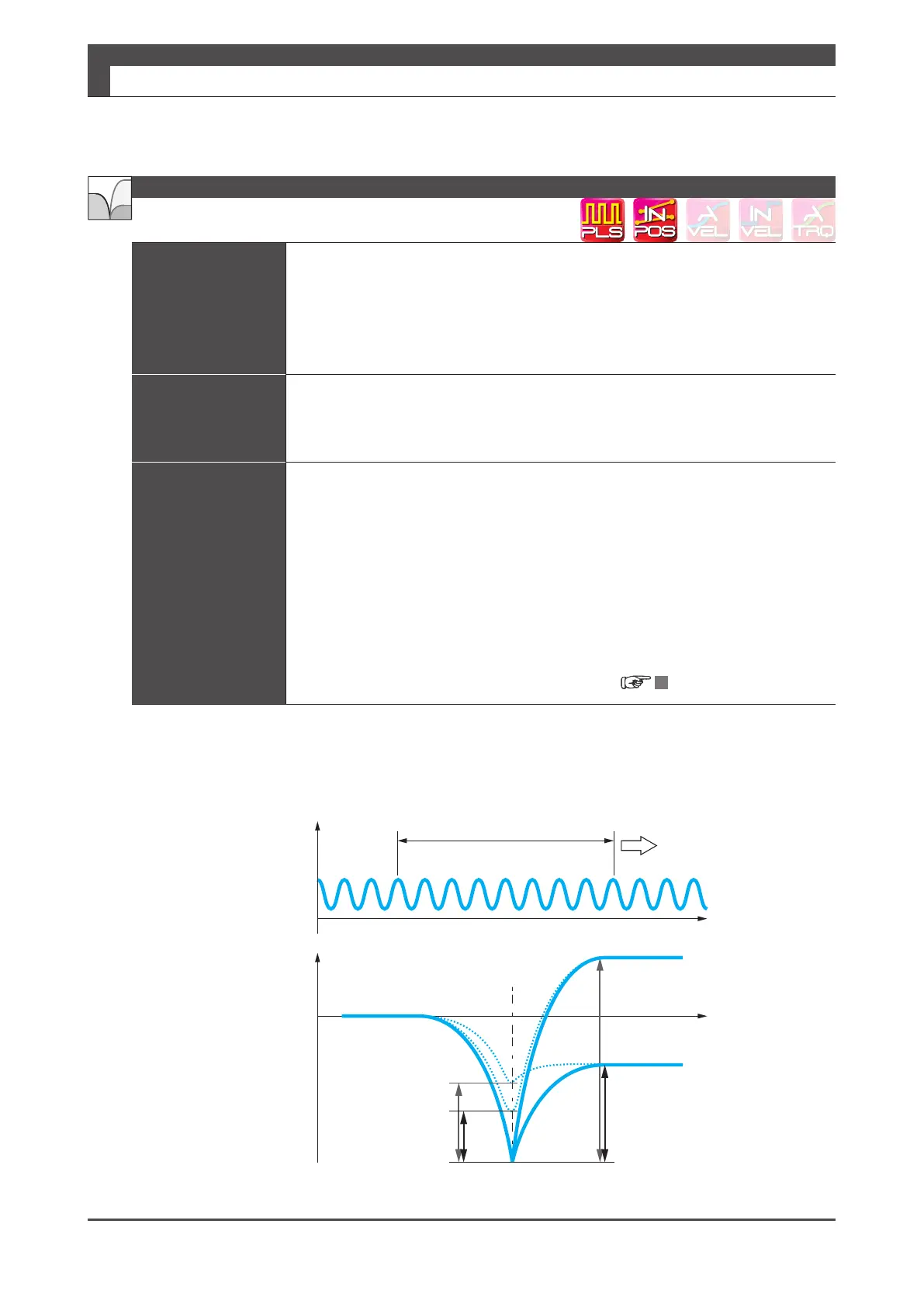
Start the equipment operation and apply the vibration frequency (measured
at the equipment end) to the notch frequency� To reduce the position
gradually increase the high frequency gain setting�
To reduce the position error during operation, increase the notch depth.
5 Setting List of Parameters
Position Command γ-Notch Filter
High Frequency Gain
t
Position error is low
very eective in suppressing vibration
Torque Command Value
or
ABS Position Error
Gain [dB]
Depth
[times]
Vibration frequency
Vibration frequency

 Loading...
Loading...
