32
Digitax SF Instruction Manual
7. Tuning
3. Tuning Parameters
Function
Increasing this parameter value will reduce the velocity error during the
acceleration /decelaration� Increasing the parameter value provides faster command
response; however, too large a value may result in noise�
Parameter
131.0
Default: 399 [rad/s]
Setting range: 100–6,000
Remark
Making a change to any of the following will also change other tuning parameters (such
as Gain FF Compensation 1
) to the prearranged parameter set all at once�
• Control gain set (129�0)
• Control level (130�0)
Tuning Tip
Use this parameter when the load inertia or the load uctuation is large�
The responsiveness will be improved and the movement will be smoother�
Noise Solutions
① Use Torque command lter: Notch lter
(such as 160�1)�
② Lower Torque command lter: Low-pass lter constant (162�0)�
③ Lower Integral gain (133�0)
When no improvement have been seen if these ① , ② , and ③ method had been performed,
please decrease the 131�0 value�
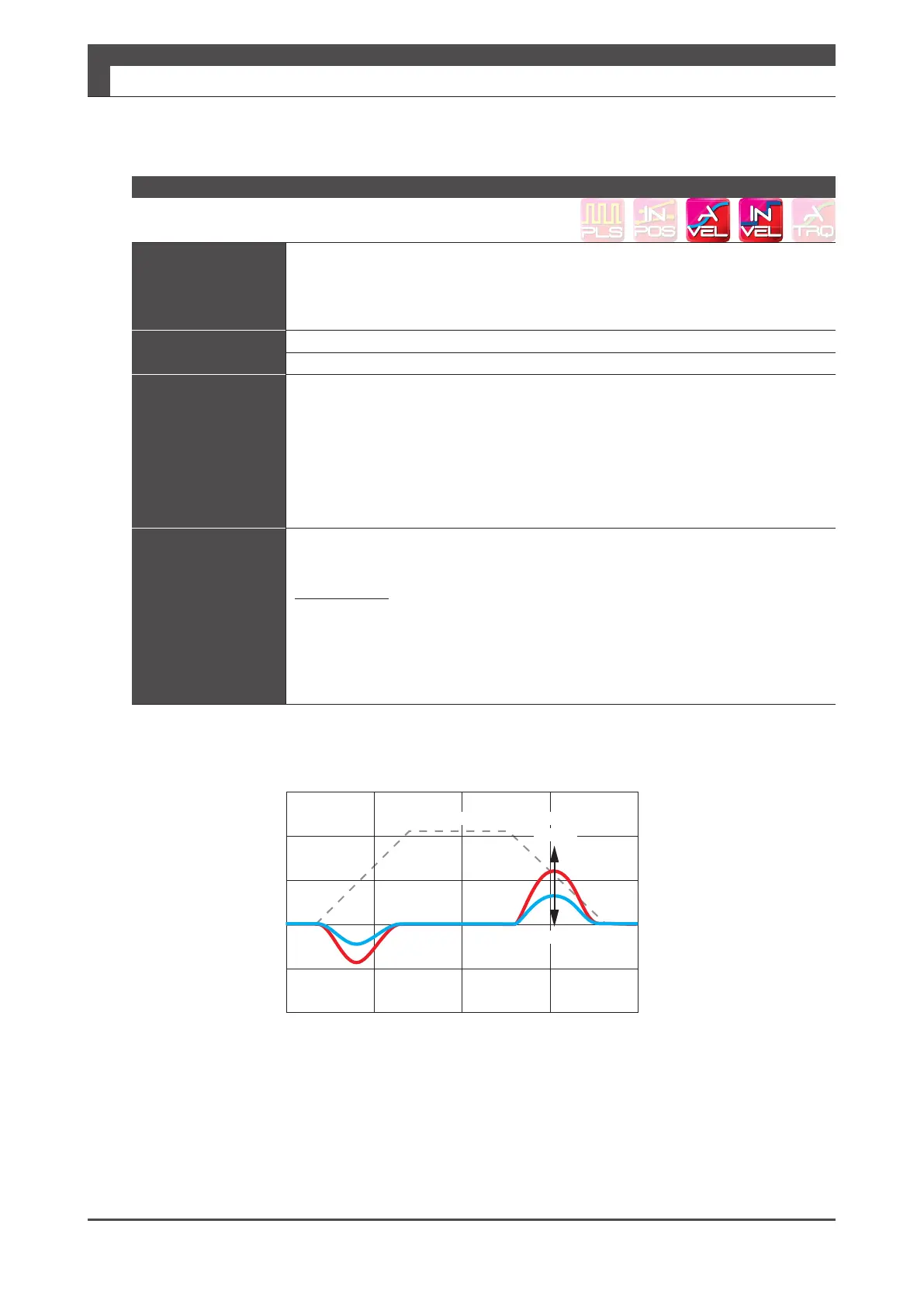
Differences in Velocity Error
Convergence
Velocity Control Mode: Control Gain 1
Velocity command
Velocity
Error
High
Low

 Loading...
Loading...
