Digitax SF Instruction Manual
6. Operation
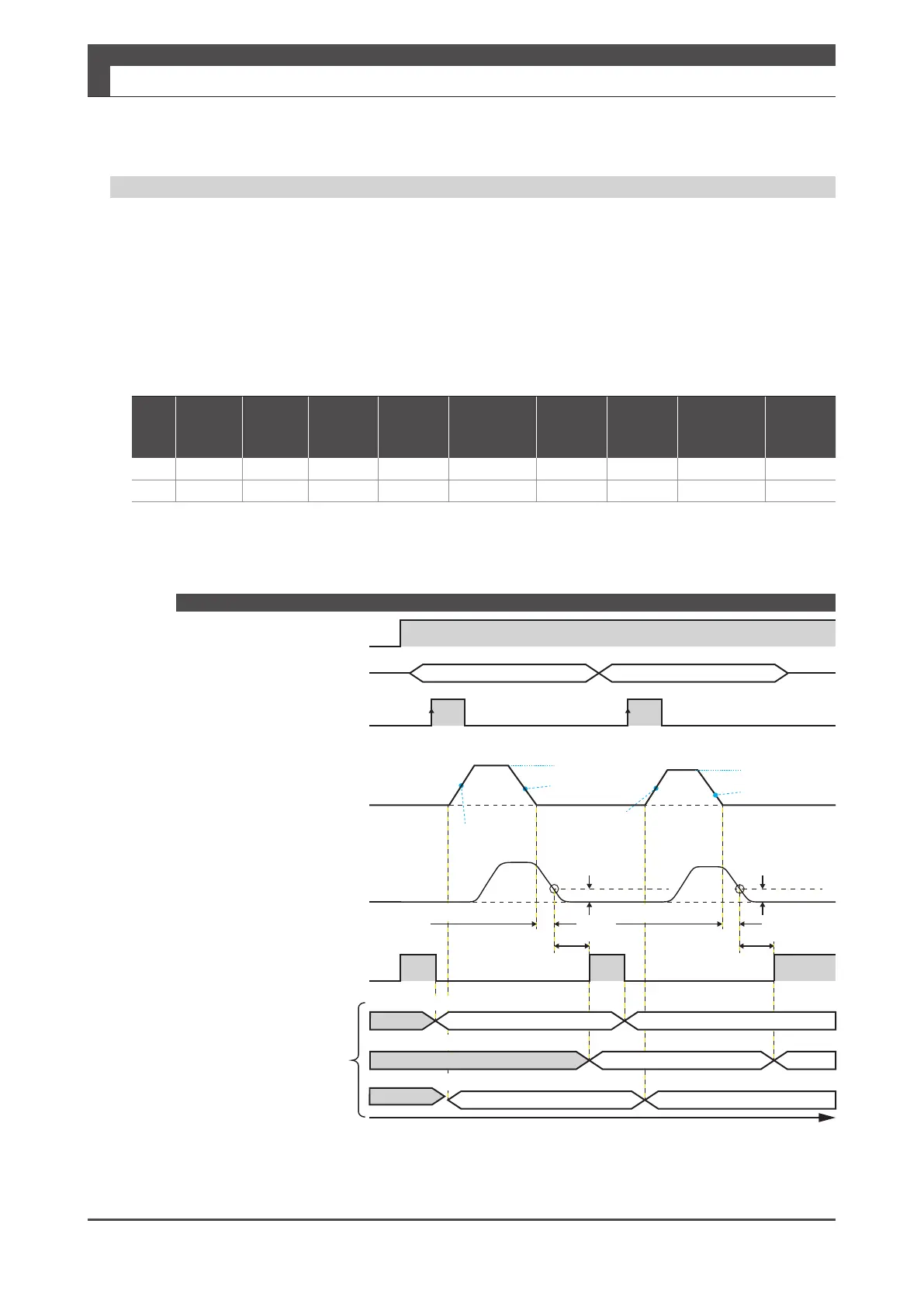
5. Position Control Mode
Example of Operation 1 Single-Motion Positioning
No. Position Rotational
Speed
[rpm]
Acceleration
Time
[ms]
Deceleration
Time
[ms]
Dwell Time
[ms]
Command
Method
Running
Motion
Positioning
Complete
[pulse]
Enable/
Disable
Single
Single
ON
−
Input
PCSEL1…4
Input
(Output)
MEND
PCSTART1
ON
OFF OFF
0[rpm]
ON
OFF
ON
Point
No.1
Point
No.2
(Output)
PM1
…
3
1
1
1
2
OFF
Input
SVON
Rotational
SpeedNo.1
Acceleration
TimeNo.1
Deceleration
TimeNo.1
DwellTime
No.2
−
0[pulse]
0
0
ı
DwellTime
No.1
1
ON
OFF
ON
OFF
2
2
2
SignalNameDescription
Chart
State
ofServo
Select
PointNo.
Start
Motor
Rotational
Speed
Position
Error
Motion
Complete
PointNo.
Rotational
SpeedNo.2
Deceleration
TimeNo.2
Positioning
CompleteNo.1
Positioning
CompleteNo.2
Acceleration
TimeNo.2
(WaitingforPositioning
Complete)
(WaitingforPositioning
Complete)
ParameterNo.
644.0=0
ParameterNo.
644.0=1
ParameterNo.
644.0=2