34
0
5,000
10,000
12,000
Digitax SF Instruction Manual
7. Tuning
3. Tuning Parameters
Function
error of the motor Increasing this parameter value will reduce the position running
at a constant speed�
Raise the value of this item only after reducing the position
error, by using
Gain FF Compensation 1 (117�0) at settling�
Parameter
118.0
Default:
0 [0�01% ]
Setting range: 0–15,000
Remark
error
will start appearing
If this parameter value is above 10,000, the position
appearing in a negative range�
When the command resolution is low, increasing this parameter value will result in
louder running sound�
Tuning Tip
With a right inertia ratio setting, setting this parameter to 10,000 minimizes the position
error �
Noise Solutions
Adjusting Filter 4: Smoothing 2- Moving average counter
(81�0) may reduce the noise�
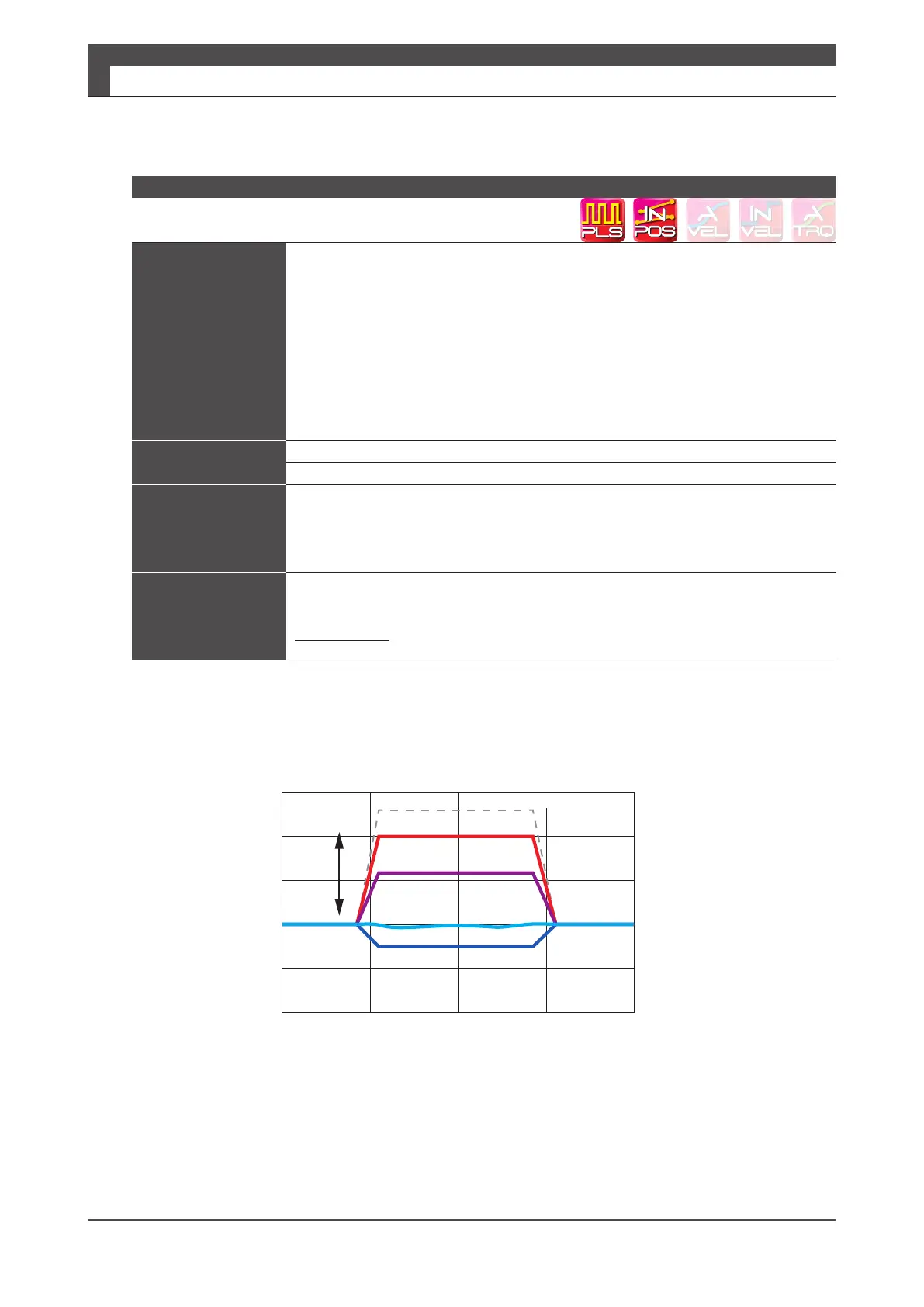
Differences in Position Error
Convergence
Position Control Mode: Gain FF Compensation 2
Velocity command value
Position
error
High
Low

 Loading...
Loading...
