Digitax SF Instruction Manual
Operation
6
6. Operation
5. Position Control Mode
5. Position Control Mode
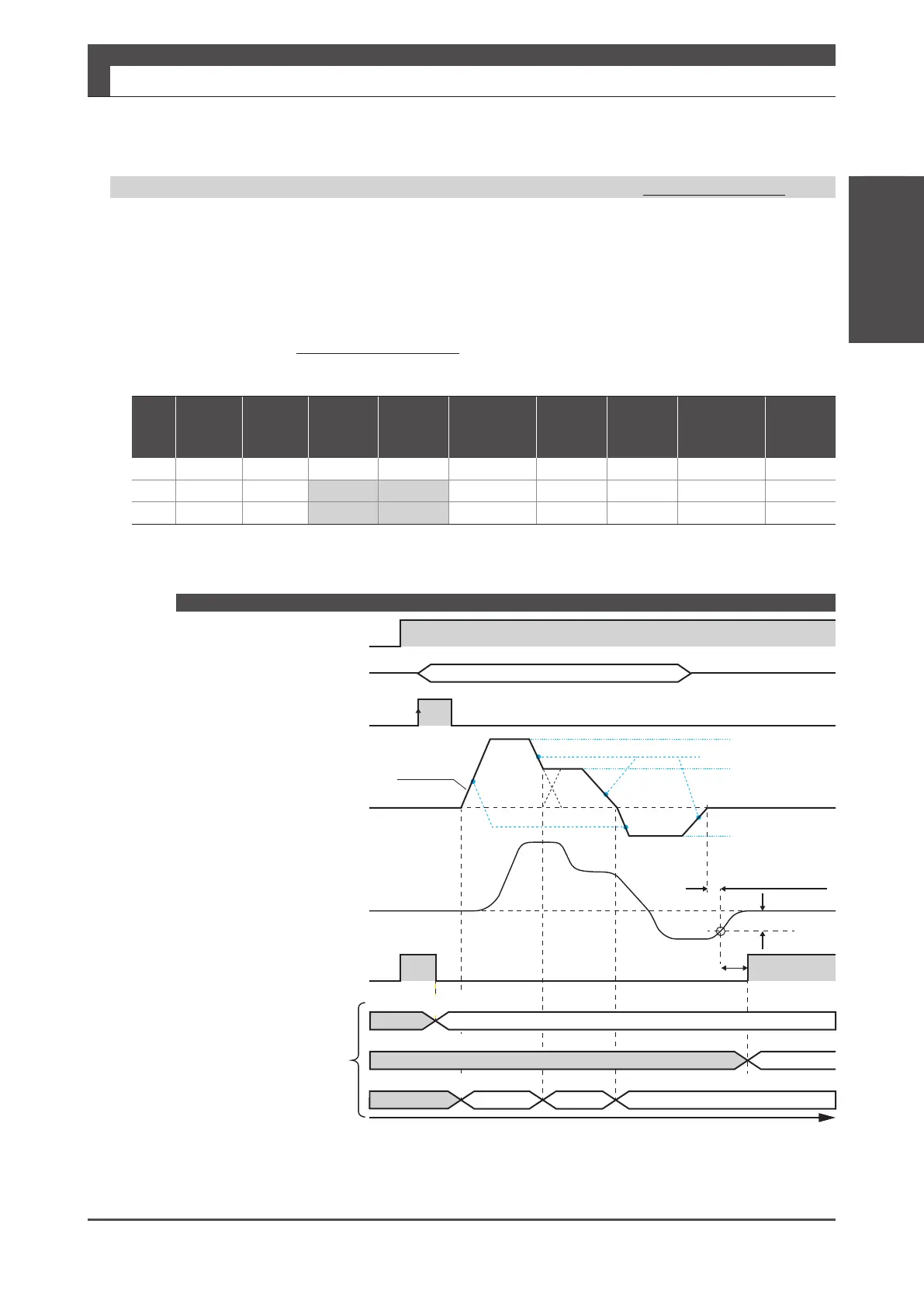
Example of Operation 4 Continuous Speed Changes (Positioning in the Opposite Direction)
following in order
set Dwell Time = 0 ms.
No. Position Rotational
Speed
[rpm]
Acceleration
Time
[ms]
Deceleration
Time
[ms]
Dwell Time
[ms]
Command
Method
Running
Motion
Positioning
Complete
[pulse]
Enable/
Disable
continuous
continuous
single
ON
−
Input
PCSEL1…4
Input
(Output)
MEND
PCSTART1
ON
OFF
OFF
0[rpm]
ON
OFF
ON
1
Point
No.1
Point
No.3
Command
Point
No.2
(Output)
PM1
…
3
1
1
12 3
OFF
Input
SVON
−
0[pulse]
0
0
0
SignalNameDescription
Chart
State
ofServo
Select
PointNo.
Start
Motor
Rotational
Speed
Position
Error
Motion
Complete
PointNo.
RotationalSpeedNo.3
RotationalSpeedNo.1
RotationalSpeedNo.2
AccelerationTimeNo.1
PositioningComplete
No.3
(WaitingforPositioning
Complete)
DwellTime
No.3
DecelerationTimeNo.1
ParameterNo.
644.0=0
ParameterNo.
644.0=1
ParameterNo.
644.0=2

 Loading...
Loading...
