Digitax SF Instruction Manual
6. Operation
5. Position Control Mode
EncoderZ-phase
EncoderZ-phase
EncoderZ-phase
EncoderZ-phase
Speed
Dog
z (z)
Position
Origin
Stopposition
zz
Speed
Dog
z
Position
Origin
Stopposition
z z
Speed
z (z) zz
Dog
Position
CarefulApproach
Origin
Stopposition
=
Speed
CarefulApproach
Dog
zz
Position
Origin
z
Stopposition
=
Speed
CarefulApproach
Sensor
Position
Motiontore-detect
thesensor
Homereferenceposition
Origin
Stopposition
=
Home
Z-phase
disableddistance
(No.657.0)
Shift-to-home
amount
(No.651.0)
Shift-to-homeamount
(No.651.0)
Z-phase
disableddistance
(No.657.0)
Homereferenceposition
Homereferenceposition
Homereferenceposition
Homereferenceposition
Motiontore-detect
thedog
Motiontore-detect
thedog
Motiontore-detect
thedog
Motiontore-detect
thedog
Shift-to-home
amount
(No.651.0)
Home
Home
Home
Home
Home
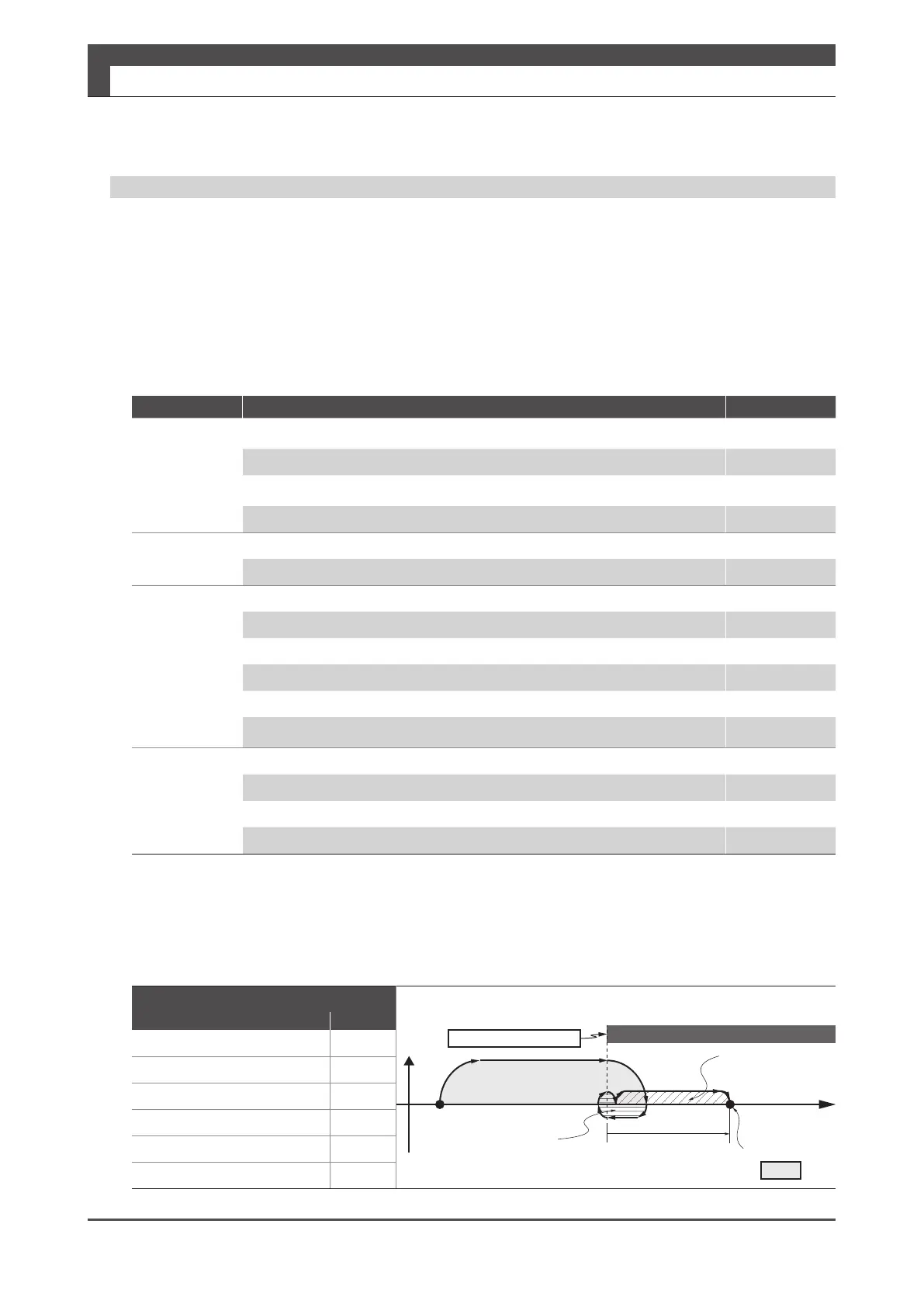
Homing Based on Home Sensor (with sensor to be re-detected)(No.645.0=2, No.645.3=1)
This operation indicates the type of homing based on the home position sensor.
another detection of the sensor-front-end after the rst detection
sensor
sensor
to define "sensorsensor
sensor
Group Name Parameter No.
sensor
645.0
646.0
l
650.0
653.0
sensor
646.1
648.0
647.1
645.1
657.0
645.3
649.0
Sensorc
651.0
646.3
647.0
646.2
659.0
Pattern 19
Parameters Settings
No.645.0
2
sensor
No.645.3
1
No.645.1
0
No.647.1
0
No.651.0
0
No.657.0
0

 Loading...
Loading...
