3
0dB
ω1 ω2
1
ω1
ω2
0dB
2
0dB
ω1
ω2
3
Digitax SF Instruction Manual
Tuning
7
7. Tuning
1. Introduction
1. Introduction
The following prearranged sets of parameters for each control mode enable you to perform tuning easily�(*)
Control Mode Parameter Set
Position Control Mode
Control Gain 1, Control Gain 2, Integral Gain
Velocity Control Mode
Control Gain 1, Integral Gain
*)
If the [Torque command lter: Low-pass lter auto setting (160�2)] is set to 1(auto setting ON), “Torque command lter: Low-pass lter”
will be included in the gain set�
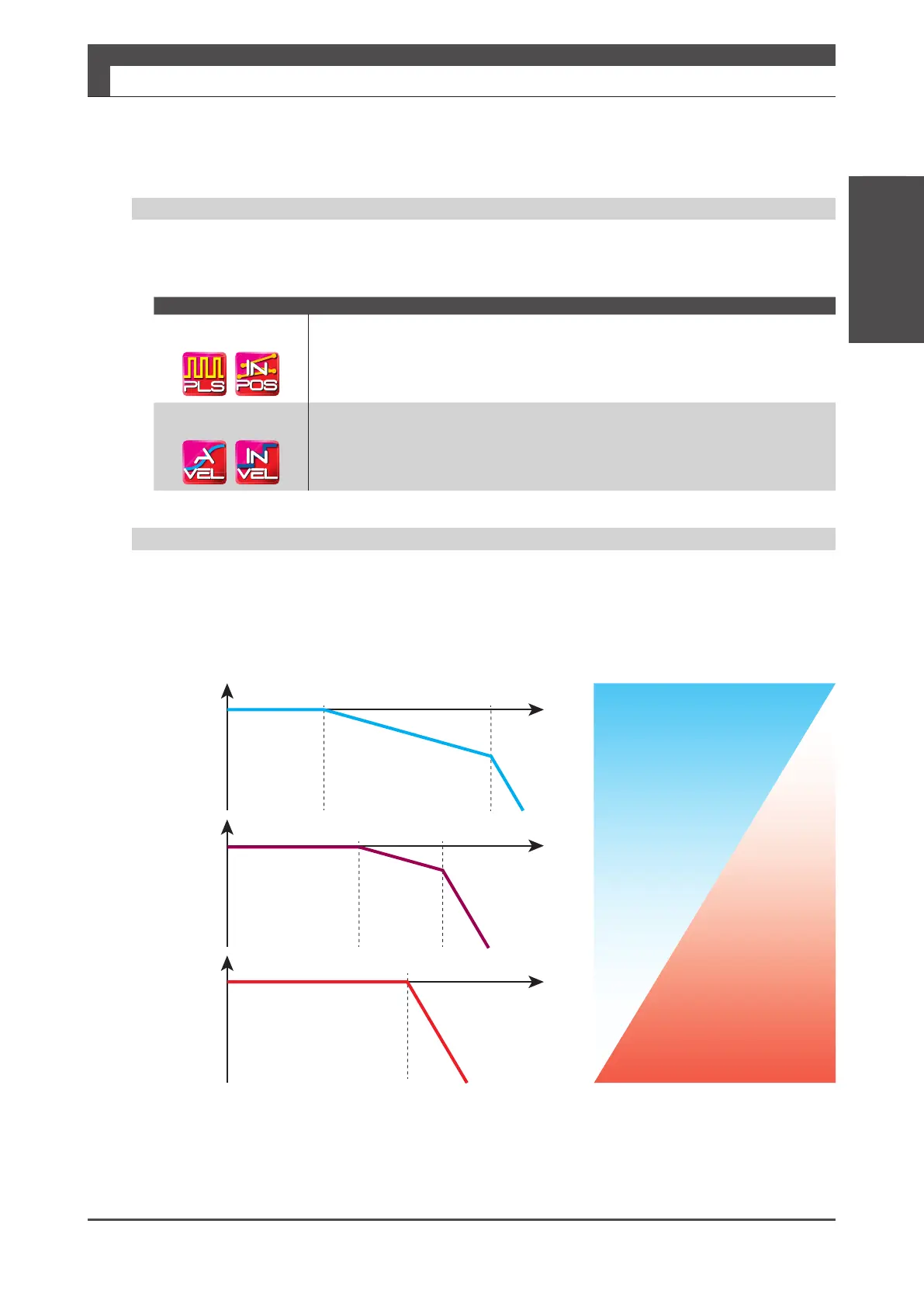
Digitax SF features three response models to support a variety of equipment� Three models are different in
ratios of Control Gain 1 ( ω1) and Control Gain 2 ( ω2) and you can select the one suitable to the stability
and convergence of your equipment�
Inertia Condition
(Heavy)
Frequency
Equipment Example
Frequency
Frequency
(Medium)
(Light)
Higher stability
Good for applications
of large load
uctuation
・Robot
Higher convergence
Micro vibration/
disturbance-resistant
・Automatic machines
・Surface mounters
Gain
Gain
Gain
Control Gain Set
Inertia Condition