7
Connection
Digitax SF Instruction Manual
2.Position Control Mode
4. Connections
2. Position Control Mode
1: 24 V
24 V GND
24 V
G24 V
2: G24 V
3: COM+
4: SVON
5: RESET
6: HOLD
9: CCWL
10: CWL
11: TLSEL1
12: COM
-
13: MBRK
14: SERVO
18: OCZ
19: SRDY+
20: SRDY
-
21: ALM+
22: ALM
-
26: CMD_PLS
FG
36: OUT_A
37: /OUT_A
38: OUT_B
39: /OUT_B
40: OUT_Z
41: /OUT_Z
43: 485
44: /485
45: SG
42: SG
27: /CMD_PLS
30: CMD_DIR
31: /CMD_DIR
SG
110
Ω
Control power supply 24 V input
Control power supply GND
I/O power supply 24 V input
INPUT䚷Servo ON
INPUT䚷Alarm reset
INPUT䚷Command input
INPUT䚷CCW run limit input
switch
INPUT䚷CW run limit switch
input
I/O power supply GND
OUTPUT䚷Motor Brake
release
OUTPUTࠉServo state
OUTPUT䚷Motion complete
/Under torque limit
㻻㼁㼀㻼㼁㼀䚷㻱㼚㼏㼛㼐㼑㼞㻌㼆㻙㼜㼔㼍㼟㼑
䠄㼛㼜㼑㼚㻙㼏㼛㼘㼘㼑㼏㼠㼛㼞䠅
OUTPUT䚷Servo-Ready+
OUTPUT
䚷
Servo-Ready
-
OUTPUT⅙Alarm State+
OUTPUT
䚷
Alarm State
-
Pulse Train
Command Input
A-phase
output
B-phase
output
Z-phase
output
Pulse
RS-422 output
2 m or
shorter
Twisted Pair Cable
Frame
Encoder Signal Output
Direction
Control Power
Shielded
㻖3
㻖1
㻖1
㻖1
㻖1
㻖2
㻖6
㻖4
㻖5
Servo Drive
4.7 k
Ω
7: PCLR
inhibition
INPUT䚷Position Error counter
clear
MAX 50 mA
MAX 50 mA
15: POSIN
OUTPUTࠉPositioning
complete
MAX 50 mA
MAX 50 mA
MAX 50 mA
MAX 50 mA
MAX 50 mA
110
Ω
SG
SG
8: HOME
INPUT䚷Homing start
16: HEND
OUTPUT䚷Homing
complete
MAX 50 mA
17:
MEND/T-LIMIT
RS-485
Host Controller
SG
㻖5
㻖4
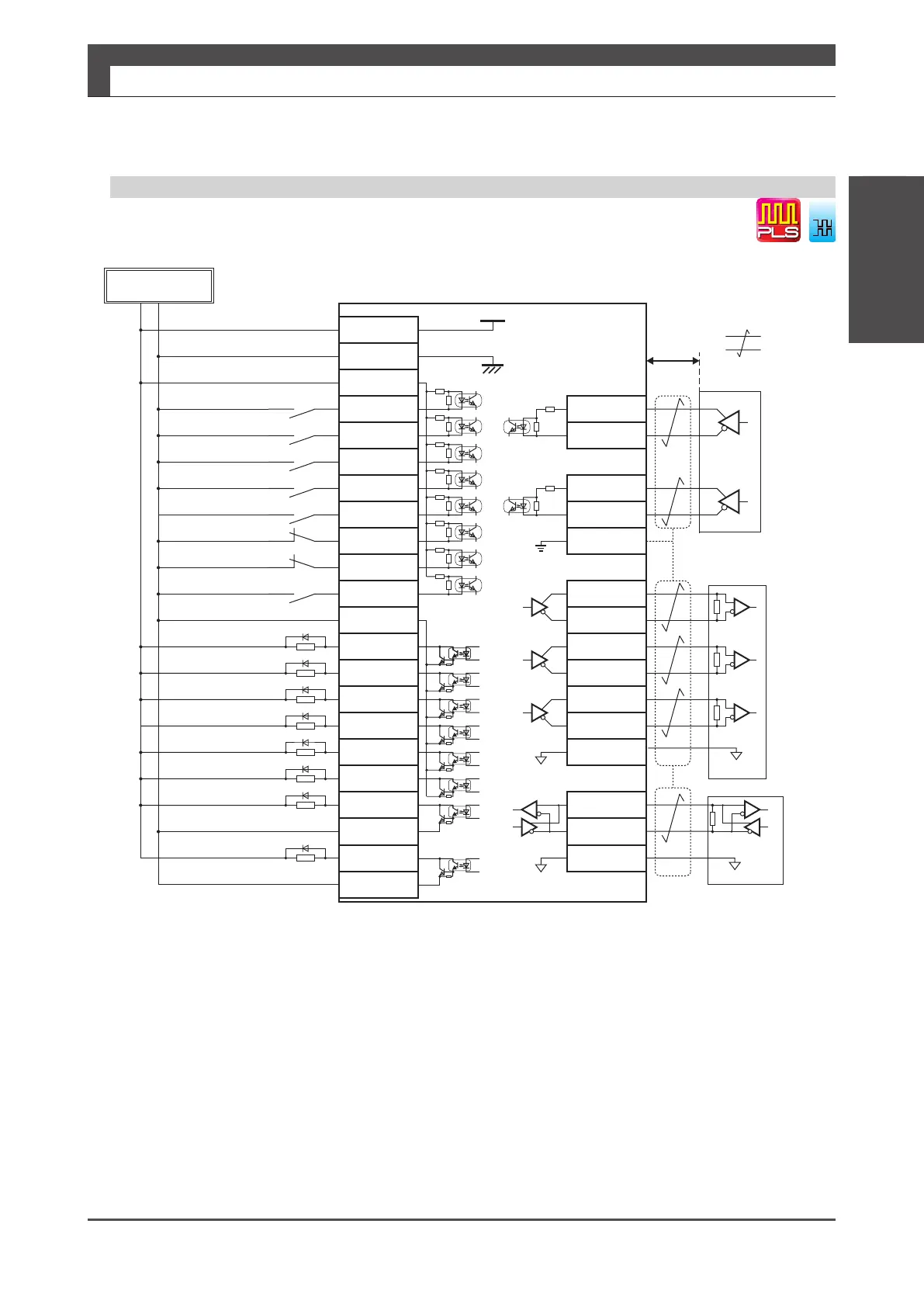
*1) Control power (24V, G24V) and power for I/O (COM+, COM-) must share one common power supply.
*2) When driving a load containing inductance (component such as a relay) connect a protection circuit (diode).
The motor brake cannot be driven directly. Be sure to use a circuit that interfaces with a diode built-in type relay.
Page 46 Connection to general-purpose output signals
*3) The output circuit conguration is an open collector Darlington transistor output. Connects to relays and optical isolators.
Note that when the transistor is on, connector-emitter voltage VCE (SAT) is approximately 1V;
a standard TTL IC does not satisfy VIL and cannot be connected
directly.
*4) Be sure to connect a termination resistor of approximately 220 Ω.
*5) Make the connection to the communication IC signal ground of the host controller that the drive encoder output signals
are connecting to. Connecting signal ground SG to control power GND may result in malfunction.
*6) If Z-phase pulse width is too small to be measured accurately by the host controller, decrease pulse division rate by using pulse output
ratio (parameters No.276.0 and No.278,0) or decrease rotational speed to increase the pulse width.
Pulse width [ms] = 2 / rotational speed [rpm] / (division ratio × 2
17
) × 60 × 1,000.
Pulse Train Command, Dierential, I/O Conguration Option 1
CN1 Connector Wiring Example
INPUT Torque limit selection