311
Inverter Positioning Section 5-3
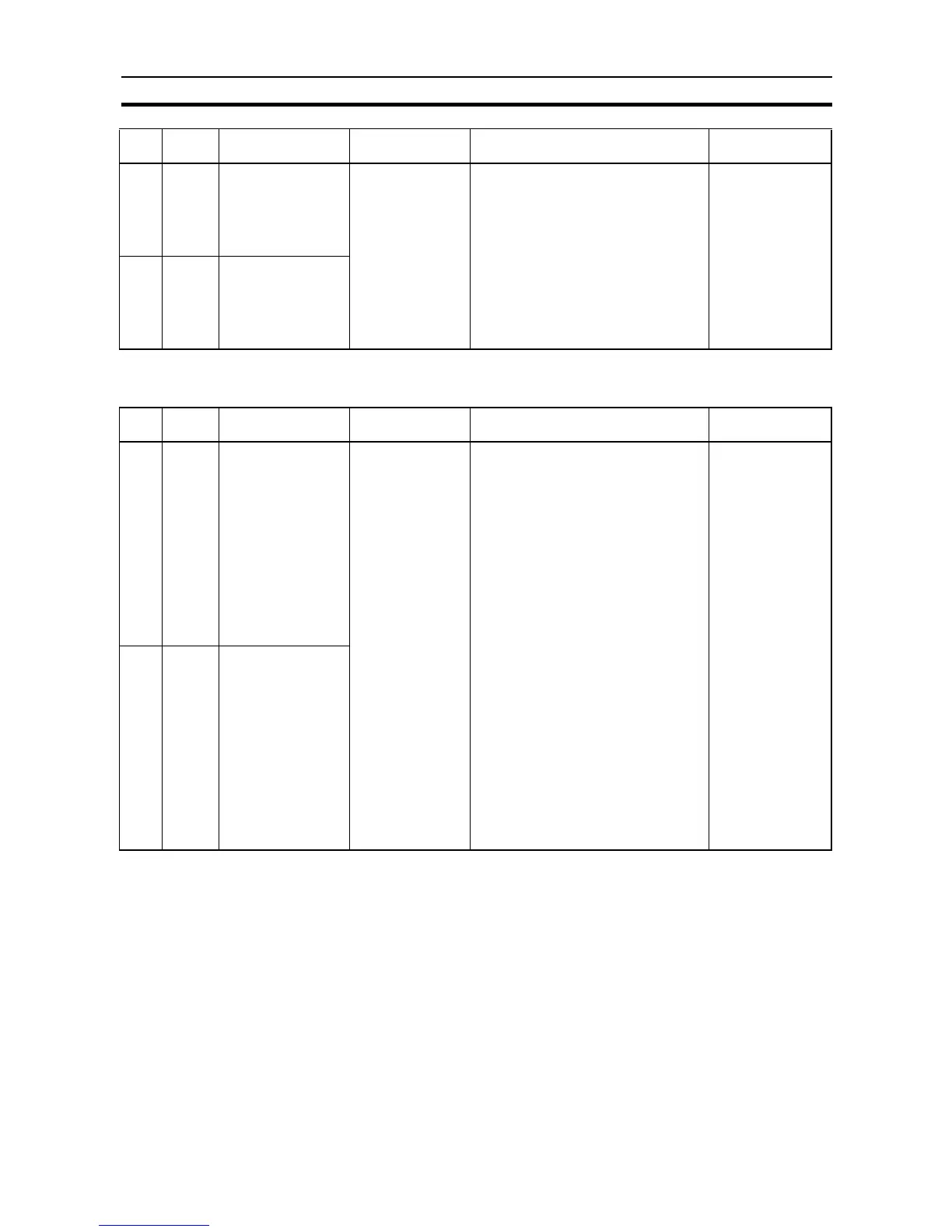
■ Inverter Positioning 1
Use one of the following for the inverter frequency command.
A276 00 to 15 Lower 4 digits of the
present value of the
internal pulse output
(absolute value for
absolute coordi-
nates)
8000 0000 to 7FFF
FFFF hex
(−2,147,483,648 to
2,147,483,647)
Contains absolute movement value
from the internal pulse origin when
pulses are output to error counter.
Cleared to zero at following times:
• When power to CPU Unit is turned ON
• When operation is started
Updated at following times:
• Cyclically on error counter cycle
This value can be
used to monitor the
present value of
the internal pulse
output as an abso-
lute value when
using absolute
coordinates.
A277 00 to 15 Upper 4 digits of the
present value of the
internal pulse output
(absolute value for
absolute coordi-
nates)
Word Bits Function Data range Refresh timing Application
examples
Word Bits Function Data range Refresh timing Application
examples
A30 00 to 15 Lower 4 digits of
present value of
unsigned output
value (output value =
present value of
error counter
× error
counter cycle (s)
×
gain)
Note The maxi-
mum and min-
imum output
values are
applied.
0000 0000 to 8000
0000 hex
(0 to
2,147,483,648)
Cleared to zero at following times:
• When power to CPU Unit is turned ON
• At start of operation
• When an error counter error occurs
Updated at following times:
• Cyclically according to error counter
cycle
This value can be
used when not
using automatic
frequency com-
mand calculations
and instead to con-
vert the output
value provided
here in the user
program for output
to the inverter.
This value is used
when signed data
is not required, i.e.,
when using com-
munications or nor-
mal I/O to specify
the direction.
A31 00 to 15 Upper 4 digits of
present value of
unsigned output
value (output value =
present value of
error counter
× error
counter cycle (s)
×
gain)
Note The maxi-
mum and min-
imum output
values are
applied.