316
Inverter Positioning Section 5-3
Read/Write Area
Note Present Values of High-speed Counter and Pulse Outputs
The present value of the high-speed counter when inverter positioning is used
is stored in the same memory location as for normal high-speed counter appli-
cation. This value can be used as the present value of feedback pulses from
the encoder, i.e., as the absolute position of inverter positioning. Target value
and range comparisons for high-speed counters are also valid.
The present value of the pulse output (A276/A277 or A278/A279), i.e., the
pulse output value to the error counter, is an absolute position if an absolute
coordinate system is specified and is a relative position if a relative coordinate
system is specified.
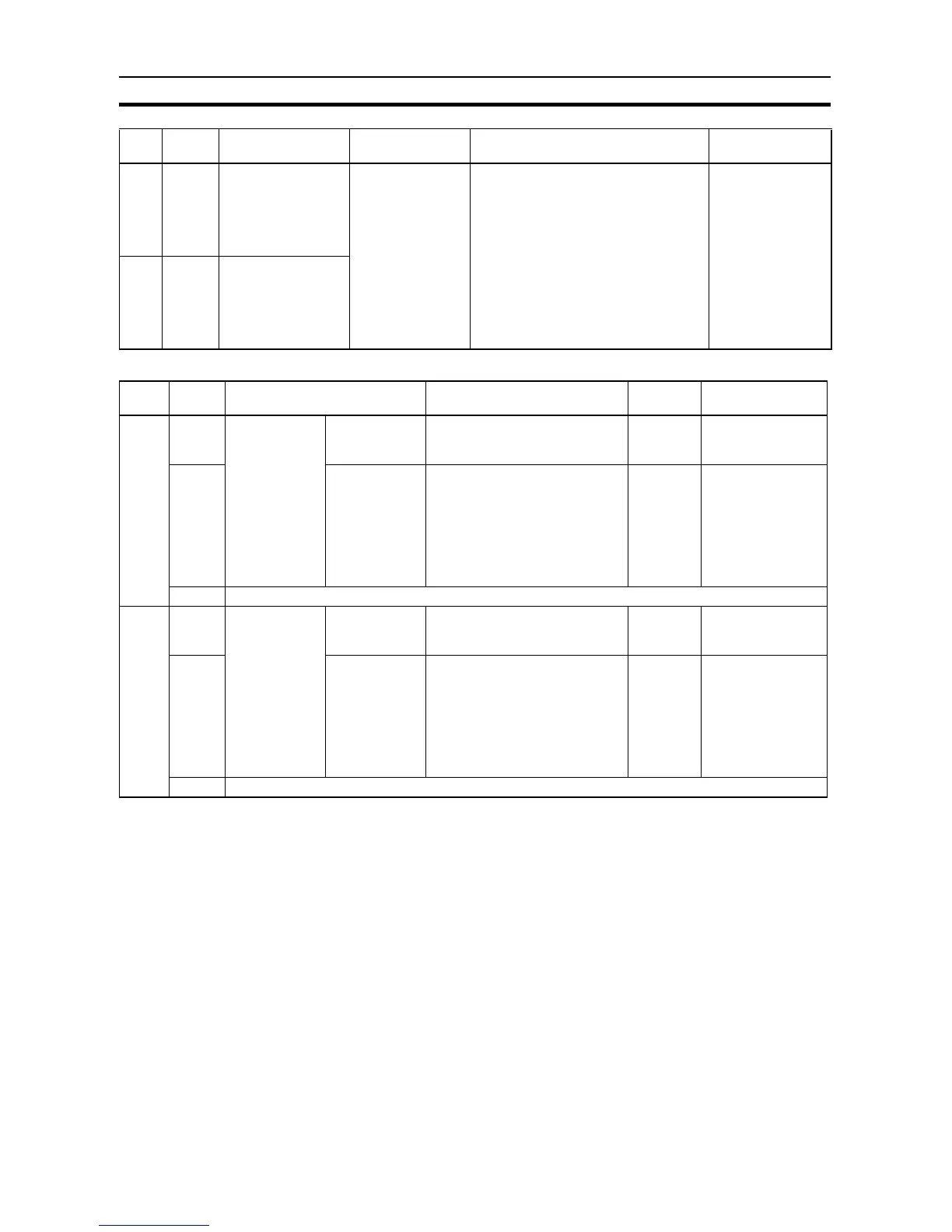
A278 00 to 15 Lower 4 digits of the
present value of the
internal pulse output
(absolute value for
absolute coordi-
nates)
8000 0000 to 7FFF
FFFF hex
(−2,147,483,648 to
2,147,483,647)
Contains absolute movement value
from the internal pulse origin when
pulses are output to error counter.
Cleared to zero at following times:
• When power to CPU Unit is turned ON
• When operation is started
Updated at following times:
• Cyclically on error counter cycle
This value can be
used to monitor the
present value of
the internal pulse
output as an abso-
lute value when
using absolute
coordinates.
A279 00 to 15 Upper 4 digits of the
present value of the
internal pulse output
(absolute value for
absolute coordi-
nates)
Word Bits Function Data range Refresh timing Application
examples
Word Bits Function Data range Refresh
timing
Application
A562 00 Inverter
positioning 0
Error Counter
Reset Bit
Turned ON: Error counter 0
present value (A22) reset and
Error Counter Error Flag cleared.
--- Turn ON this bit to
clear the error
counter error status.
01 Error Counter
Disable Bit
While ON: Error counter value
held.
--- Turn ON this bit, for
example, to disable
accumulating
pulses in the error
counter when stop-
ping positioning and
moving the motor
shaft manually.
02 to 15 Not used.
A563 00 Inverter
positioning 1
Error Counter
Reset Bit
Turned ON: Error counter 0
present value (A32) reset and
Error Counter Error Flag cleared.
--- Turn ON this bit to
clear the error
counter error status.
01 Error Counter
Disable Bit
While ON: Error counter value
held.
--- Turn ON this bit, for
example, to disable
accumulating
pulses in the error
counter when stop-
ping positioning and
moving the motor
shaft manually.
02 to 15 Not used.