108 - MCM260X - Manuale d’uso
10 CANopen
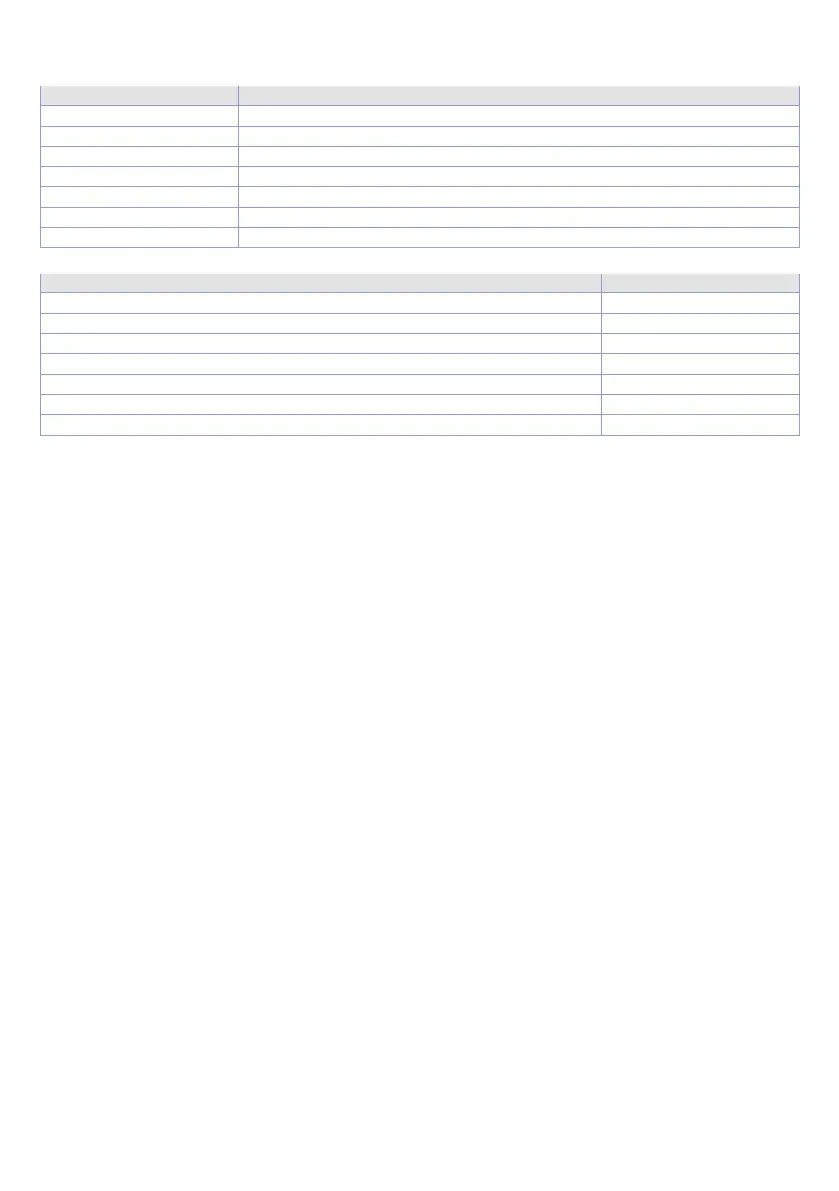
A seconda del tipo di lampeggio, il LED RUN indica tutti gli stati operativi del protocollo CANopen
Nome lampeggio LED RUN Tipo di lampeggio
Blink_fast Lampeggio rapido a 50msec
Blink_medium Lampeggio a 200msec
Blink_slow Lampeggio a 600msec
LED_on LED sempre acceso
Blink_3_on LED acceso per 1sec, 3 lampeggi da 150msec
Blink_1_off Lampeggio lento di 40msec ogni 1.2sec
Blink_3_off LED spento per 1sec, 3 lampeggi da 150msec
Stato Lampeggio led RUN
Boot-up Blink_fast
Pre-Operational Blink_slow
Operational LED_on
Stopped Blink_1_off
Pre-Operational con Emergency Blink_medium
Operational con Emergency Blink_3_on
Stopped con Emergency Blink_3_off
10.1 SET-UP nodo CANopen slave
Una rete in CANopen prevede una resistenza di fine linea di 120 Ω. Nel caso di una connessione di più
moduli in cascata, alla fine della linea, è necessario inserirla nell’ultimo MCM260X della rete.
10.2 Funzionamento nodo CANopen slave
All’accensione, dopo il boot-up, il modulo si porta automaticamente nello stato Pre-Operational (LED
RUN lampeggio Blink_slow). In questo stato non sono ammesse trasmissioni/ricezioni di PDO, ma solo
di SDO. Per passare da Pre-Operational ad Operational, è necessario un messaggio NMT da un master.
10.3 EDS Files
I files EDS dei vari modelli sono disponibili nell’area download del sito www.pixsys.net.
11 CANopen nel dettaglio
CAN (Controller Area Network) è un sistema bus Multimaster. I messaggi sono inviati al bus con una
determinata priorità, definita dal COB ID (Communication Object Identifier). CANopen è un protocollo
definito dalle specifiche DS 301 CIA (CAN in automation). Il CANopen è costruito sopra il CAL (CAN
Application Layer, un protocollo di comunicazione di alto livello per reti CAN-based). Il CAL definisce
4 tipi di elementi di servizio:
• CMS: (CAN-based Message Specification): definisce un insieme di oggetti (Variabili, Eventi, Domini)
che determinano come l’interfaccia CAN può accedere alle funzioni dei nodi della rete.
• NMT: (Network Management): definisce tutti i servizi di una rete del tipo master-slave come inizia-
lizzazione, start e stop dei nodi, rilevamento degli errori.
• DBT: (Distributor): definisce una distribuzione dinamica degli identificatori CAN per i nodi della
rete, chiamati COB-ID (Communication Object Identifier)
• LMT: (Layer Management): offre la possibilità di cambiare parametri come l’indirizzo NMT di un
nodo, bit-timing e baud-rate di un’interfaccia CAN.
CMS definisce 8 livelli di priorità, ciascuno con 220 COB-ID.
Gli altri identificatori sono riservati per NMT, DBT e LMT.