44 - MCM260X - Manuale d’uso
10 CANopen
Depending on the type of flashing, the RUN LED indicates all the operating statuses of the CANopen
protocol.
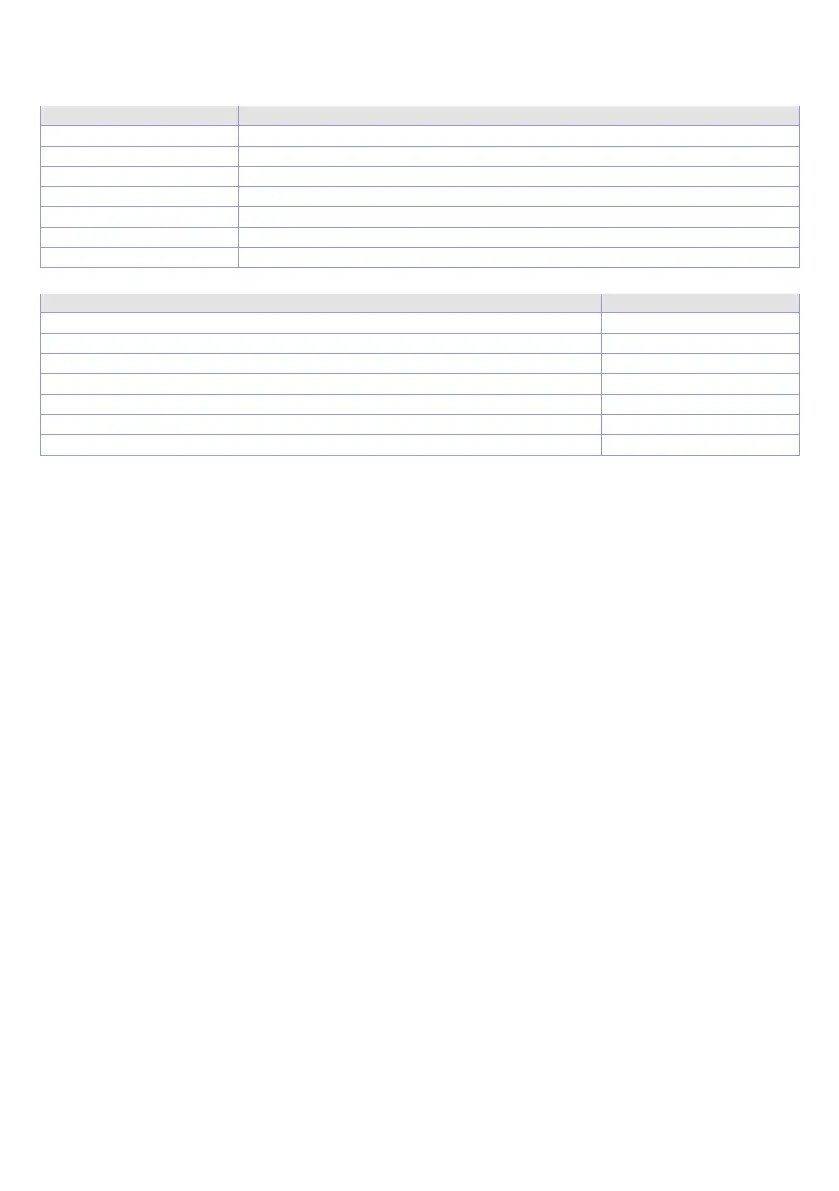
RUN LED flashing name Type of flashing
Blink_fast Rapid flashing at 50msec
Blink_medium Flashing at 200msec
Blink_slow Flashing at 600msec
LED_on LED always on
Blink_3_on LED on for 1sec, 3 flashes for 150msec
Blink_1_off Slow flashing of 40msec every 1.2sec
Blink_3_off LED off for 1sec, 3 flashes for 150msec
Status RUN LED flashing
Boot-up Blink_fast
Pre-Operational Blink_slow
Operational LED_on
Stopped Blink_1_off
Pre-Operational with Emergency Blink_medium
Operational with Emergency Blink_3_on
Stopped with Emergency Blink_3_off
10.1 SET-UP of slave CANopen node
A CANopen network requires a 120 Ω end of line resistance. If more devices are to be connected in
cascade, it is necessary to insert in the last MCM260 of the network, at the end of the line.
10.2 Slave CANopen node operation
At power on, after boot-up, the module will switch to the Pre-Operational status automatically
(RUN LED Blink_slow blinking). In this status no transmission/reception of PDO is admitted, but only of
SDO. To change from Pre-Operational to Operational, an NMT
from a master.
10.3 EDS Files
EDS files of the various models are available in the download area at www.pixsys.net.
11 CANopen in detail
CAN (Controller Area Network) is a Multimaster bus system. The messages are sent to the bus with
a certain priority, defined by the COB ID (Communication Object Identifier). CANopen is a protocol
defined by the DS 301 CIA specifications (CAN in automation). The CANopen is formed above the
CAL (CAN Application Layer, a high level communication protocol for CAN-based networks). The CAL
defines 4 types of service elements:
• CMS: (CAN-based Message Specification): defines a set of objects (Variables, Events, Domains) that
determine how the CAN interface can access the functions of the network nodes.
• NMT: (Network Management): defines all the master-slave type services of a network, such as node
initialization, start and stop, error detection.
• DBT: (Distributor): defines a dynamic distribution of the CAN identifiers for the network nodes,
called COB-ID (Communication Object Identifier)
• LMT: (Layer Management): offers the possibility to change parameters such as the NMT address of
a node, bit-timing and baud-rate of a CAN interface.
CMS defines 8 priority levels, each with 220 COB-ID.
The other identifies are reserved for NMT, DBT and LMT.