Manuale d’uso - MCM260X - 111
determina una risposta contenente lo stato del nodo stesso.
• Boot-up: uno slave NMT trasmette questo messaggio dopo la transizione da stato Initialising a
stato Pre-Operational.
Gli SDO sono tipicamente utilizzati per configurare i dispositivi di una rete CANopen, mentre i PDO
sono usati per il trasferimento veloce dei dati. Tutti i dispositivi CANopen dovrebbero avere almeno
un PDO, tutti gli altri oggetti di comunicazione sono opzionali.
11.1.2 CANopen Pre-defined Connection Set
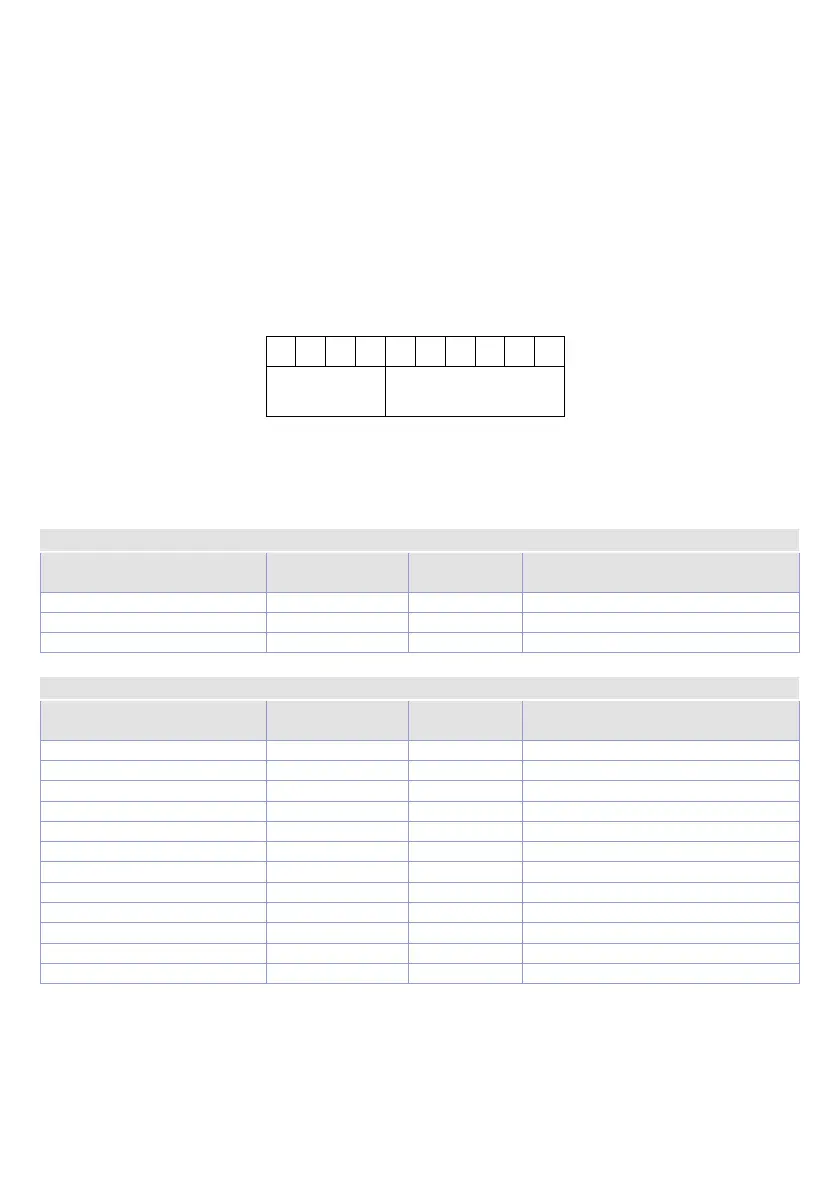
Quando un dispositivo deve rispondere ad una richiesta del master, viene utilizzato un frame di
default. E’ formato da 11 bit, dove i primi 7 bit (LSB) sono usati per il Node-ID (indirizzo nodo, range
1..127, definito da configurazioni specifiche del produttore), e gli ultimi 4 bit (MSB) sono usati per il
Function Code.
10
MSB
Function code Node-ID
LSB
9 8 7 6 5 4 3 2 1
Pre-defined connection set definisce 4 Rx PDO, 4 TX PDO, 1 SDO, 1 Emergency Object e 1 Node-Er-
ror-Control Identifier. Supporta inoltre la trasmissione in broadcast di oggetti NMT Module Control
Services, SYNC e Time Stamp. Lo schema di assegnazione di identificatore CAN completo è riportato
nel seguente schema:
11.1.2.a Oggetti broadcast del CANopen Pre-defined Connection Set
Oggetto
Function Code
(bit 7...10)
COB-ID Parametri di comunicazione
NMT Module Control 0000 0x000 -
SYNC 0001 0x080 0x1005, 0x1006, 0x1007
Time Stamp 0010 0x100 0x1012, 0x1013
11.1.2.b Oggetti Peer-to-Peer del CANopen Pre-defined Connection Set
Oggetto
Function Code (bit
7...10)
COB-ID Parametri di comunicazione
Emergency 0000 0x81 – 0xFF 0x1024, 0x1015
PDO1 (trasmesso) 0 011 0x181 – 0x1FF 0x1800
PDO1 (ricevuto) 0100 0x201 – 0x27F 0x1400
PDO2 (trasmesso) 0101 0x281 – 0x2FF 0x1801
PDO2 (ricevuto) 0110 0x301 – 0x37F 0x1401
PDO3 (trasmesso) 0111 0x381 – 0x3FF 0x1802
PDO3 (ricevuto) 1000 0x401 – 0x47F 0x1402
PDO4 (trasmesso) 1001 0x481 – 0x4FF 0x1803
PDO4 (ricevuto) 1010 0x501 – 0x57F 0x1403
SDO (trasmesso/ricevuto) 1011 0x581 – 0x5FF 0x1200
SDO (ricevuto/client) 110 0 0x601 – 0x67F 0x1200
NMT Error Control 1110 0x701 – 0x77F 0x1016, 0x1017
Tutti gli identificatori peer-to-peer sono differenti, così solo un dispositivo master può comunicare
con ciascun nodo slave (fino a 127 nodi). Due slave non possono comunicare perchè non conoscono il
node-ID dell’altro, solo il master li conosce.