Page 92 of 254
Part No. 96000001
The wrong sound velocity, at the sonar
head, will cause erroneous data. There are
currently no known post-processing tools
to correct for this.
If the sound velocity is wrong, the beam steering will be in error. If the sound velocity is greater than
what it really is at the face of the receiver, the ranges will be shorter, and thus the bottom will curve
up or ‘smile’. If the sound velocity is less than what it really is at the face of the receiver, the ranges
will be longer, and the bottom will curve down or ‘frown’. This error can be confused with a
refraction error caused by the wrong water column sound velocity profile. The refraction error can
be corrected by entering the correct water column sound velocity profile; however; erroneous beam
steering cannot be corrected as it is part of the beam data.
Therefore, for accurate beam steering to take place, an accurate sound velocity must be provided to
the Sonic MBES.
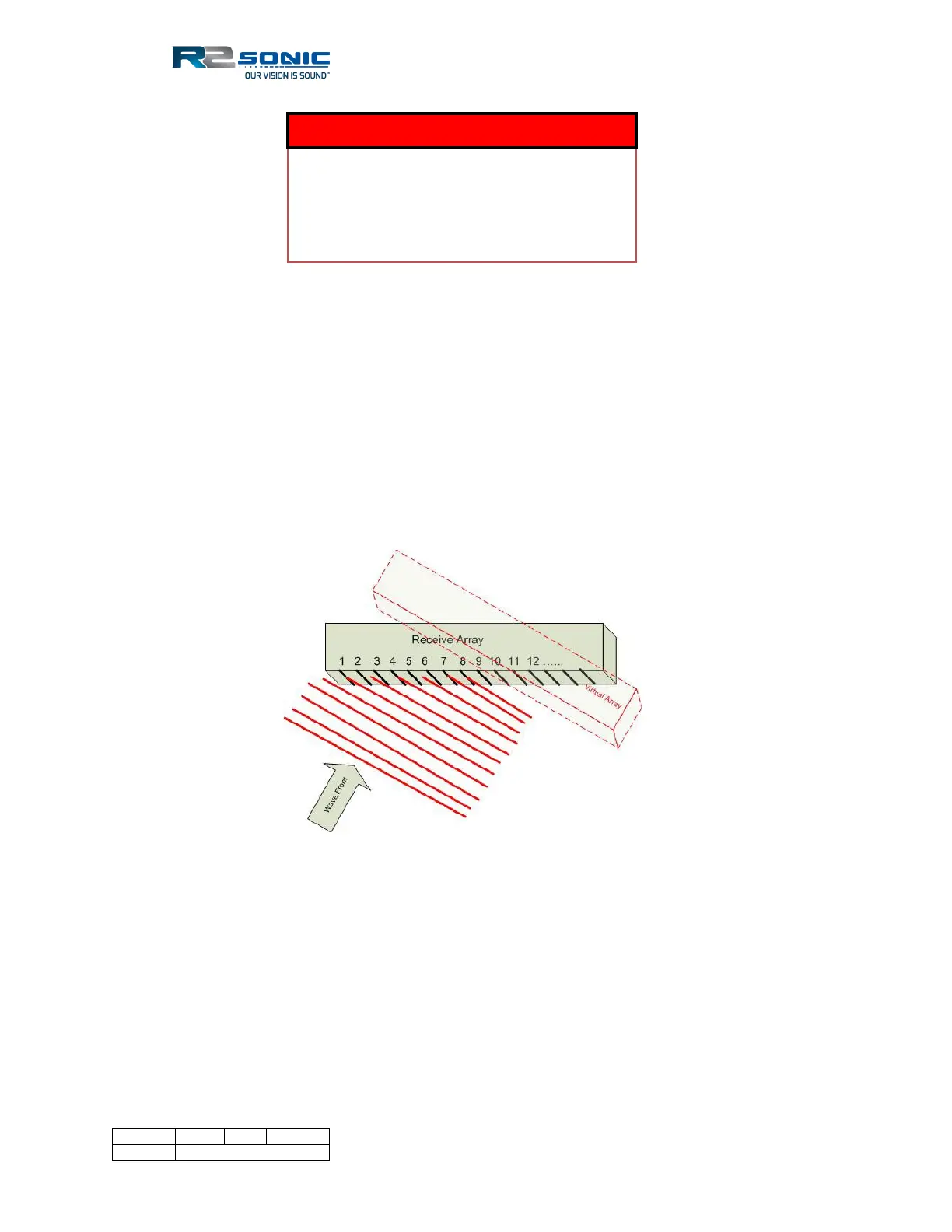
Figure 96: The angular acoustic wavefront will strike each receive element at a different time
As the wave progresses across the face, each receive element will see the wave at a slightly different
time and thus a slightly different phase. The formed beam is steered in the direction of the acoustic
wave by selectively adding delay to each receive element’s data until the data is coherent and in
phase. In the figure, above, receive element 1 would have the most delay applied, whereas receive
element 8 would have no delay; thus, a ‘virtual array’ will be formed.