Manual – MOVIDRIVE® MDX61B Safety Module MOVISAFE® DCS..B Option
99
7
Determining/checking the response times for validation
Validation
The drive is to be monitored for safe speed (SLS safety function). If the velocity is
exceeded, the drive is switched off immediately (STO safety function).
A sensor provides a signal for activating the SLS safety function (t
1
). This signal is read
locally in the DCS21B option and is reported to the safety controller via PROFIsafe (t
2
+ t
ps
). Next, the safety controller activates the SLS safety function in the DCS21B option
via PROFIsafe (t
R2
).
The DCS21B option reports the status of the SLS safety function to the safety controller
via PROFIsafe. When the SLS safety function trips, a message is issued to the safety
controller via PROFIsafe (t
R3
). The safety controller then disables the relevant outputs
of the DCS21B option via PROFIsafe (STO, t
R4
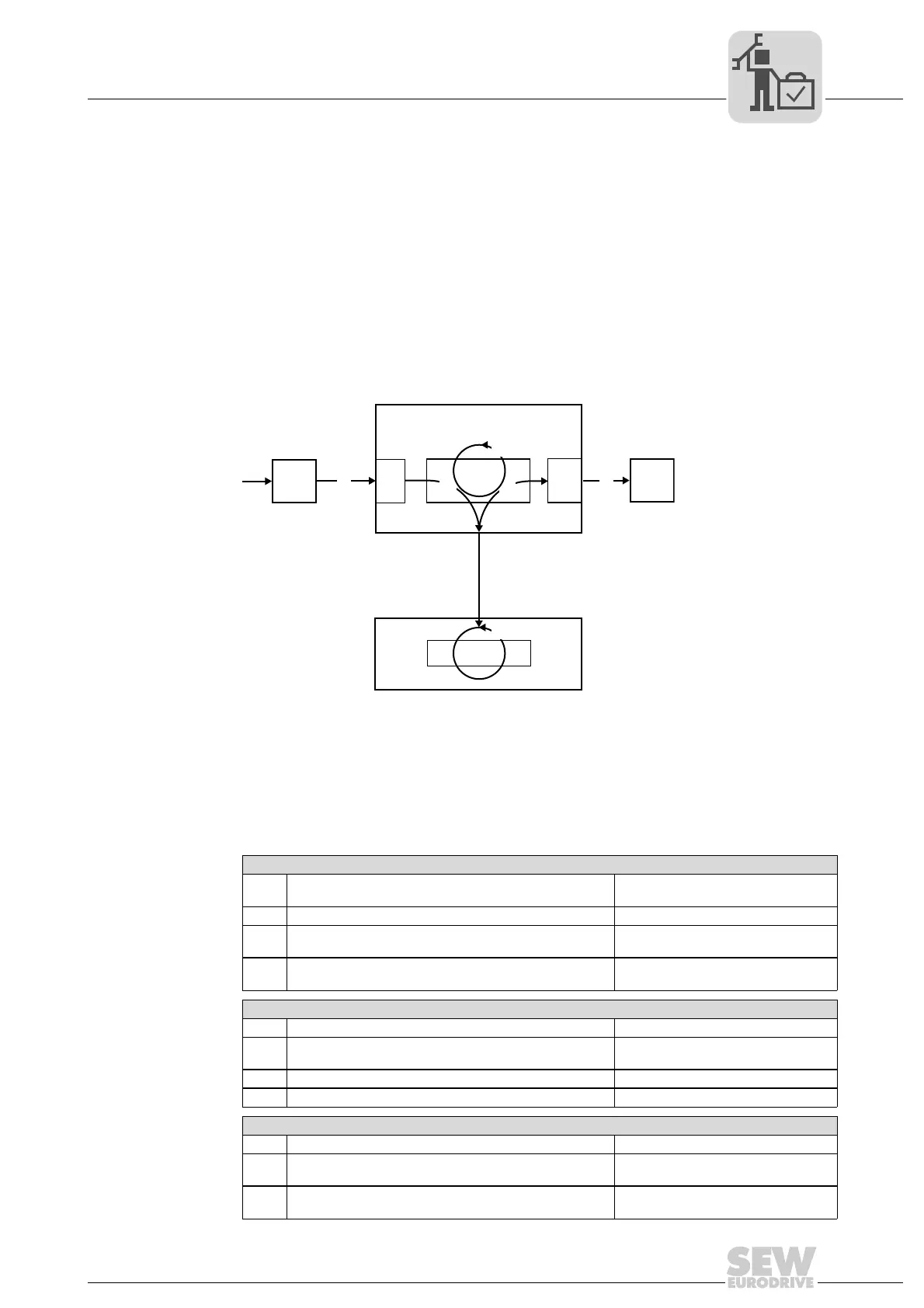
). The following figure shows the chain
of responses for determining the overall response time from the safety sensor to the
actuator.
4153959947
DCS21B Safety monitor
S Safety sensor
F-DI Safe input DCS21B
F-DO Safe output DCS21B
A Actuator
F CPU Safety controller
µC Micro-controller
Response time from safety sensor to receipt in safety controller
t
1
Response time of the safety sensor According to manufacturer's
specifications
t
2
Internal response time of the safe input (NC contact) 84 ms
t
ps
PROFIsafe cycle time According to specifications of the safety
controller
t
R1
Informationen pending in the F-CPU for further
processing
Total
Response time until the SLS safety function is activated in the DCS21B option
t
4
Cycle time F-SPS (worst case = 2 cycles) Determine from safety controller
t
ps
PROFIsafe cycle time According to specifications of safety
controller
t
3
Activation of a safety function 56 ms
t
R2
SLS monitoring is activated Total
Response time of SLS from the time when it is triggered until receipt in the safety controller
t
3
Response of SLS and status in PROFIsafe process image 112 ms
t
ps
PROFIsafe cycle time According to specifications of the safety
controller
t
R3
Informationen pending in the F-CPU for further
processing
Total
F-DO
t
2
t
5
DCS21B
F-CPU
S
C
µ
C
µ
t
1
F-DI
t
ps
t
4
t
3
A
t
1
 Loading...
Loading...