8-18 Siemens Energy & Automation
SIMOREG DC Master Base Drive Panel Operating Instructions
9.3 Jog (Inching) Configuration
If the unit is not already running, a JOG command can be given to the unit to cause it to start and run at a pre-
selected speed. When the JOG command is released the motor speed will come to zero and the unit will stop.
Up to 8 jog speeds can be configured. If positive reference values are used, the motor will jog forward while
negative reference values will jog the motor in reverse.
Sources for both the jog command and the jog setpoint need to be configured. The source of the Jog
commands is selected using parameter P435, however the first two, Jog1 and Jog2, can also be set from the
source selected with parameters P668 and P669 through the control word 1 bits 8 and 9.
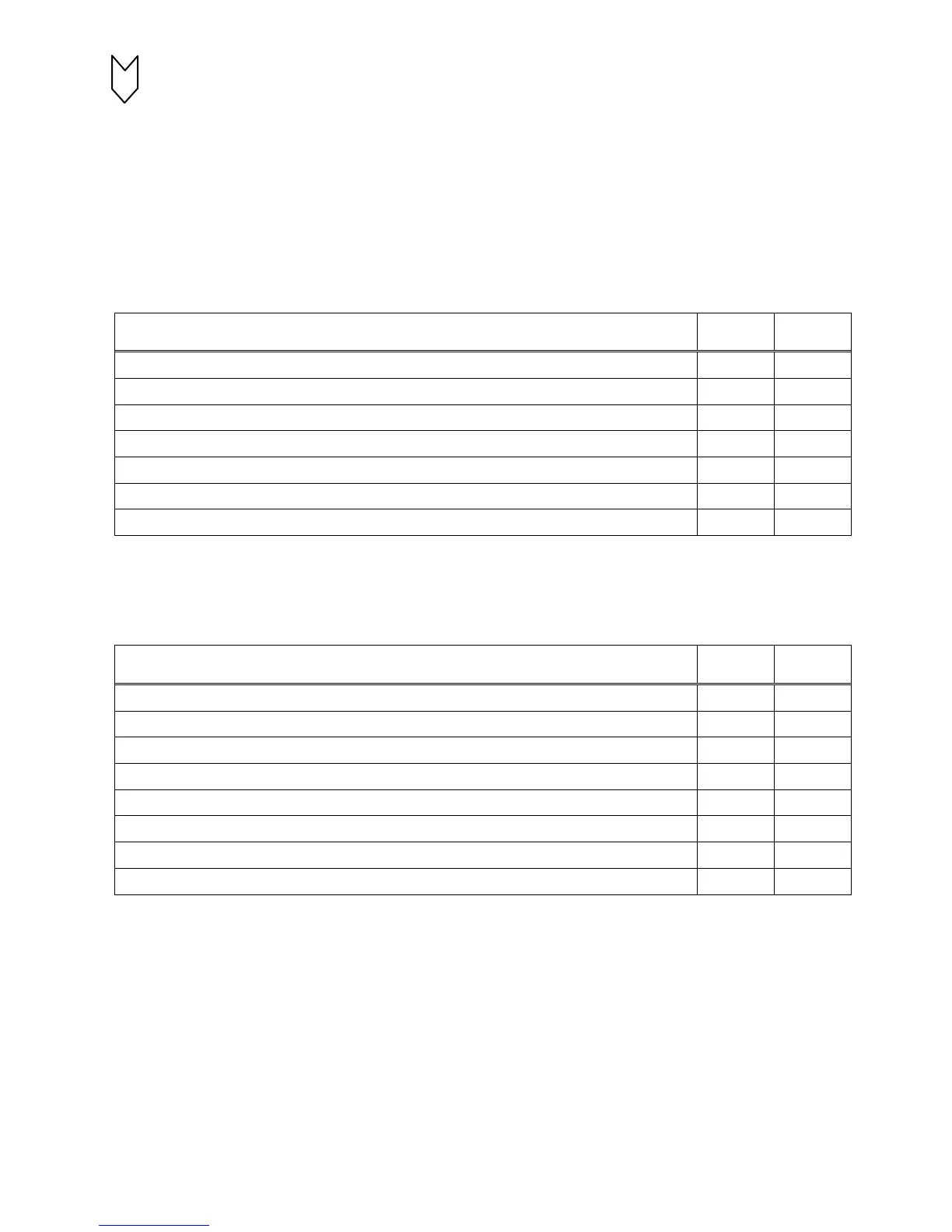
The following tables show a few examples of how the Jog commands and setpoints can be configured. The
source of the command and setpoint are completely independent for maximum flexibility.
Source of Jog Command P435 = Value
Terminal 36 @ connector X171 = Jog 1 Index .01 B0010
Terminal 39 @ connector X171 = Jog 2 Index .02 B0016
Serial Interface 1, X300, USS protocol, Word 1, Bit 8 = Jog 3 Index .03 B2108
Serial Interface 2, X172, USS protocol, Word 1, Bit 9 = Jog 4 Index .04 B6109
Technology Board or First Communication Board, Word 1, Bit 4 = Jog 5 Index .05 B3104
Second Communication Board, Word 1, Bit 5 = Jog 6 Index .06 B8105
Serial Interface 3, CUD2 X162, USS protocol, Word 1, Bit 3 = Jog 7 Index .07 B9107
If more than one source is selected for the same command, then the command will be issued when either one
is issued. If more than one jog function is selected, then the selected jog setpoints are added together. This
feature allows the available jog speeds to be greatly expanded using various jog combinations.
Source of Jog Setpoint P436 = Value
Analog select Input 1, terminals 6 to 7 @ connector X174 = Jog 1 setpoint Index .01 K0015
Fixed Jog 2 setpoint from parameter P401 Index .02 K0401
Fixed Jog 3 setpoint from parameter P402 Index .03 K0402
Serial Interface 1, X300, USS protocol, Word 4 = Jog 4 Index .04 K2004
Serial Interface 2, X172, USS protocol, Word 5 = Jog 5 Index .05 K6005
Technology Board or First Communication Board, Word 3 = Jog 6 Index .06 K3003
Second Communication Board, Word 3 = Jog 7 Index .07 K8003
Serial Interface 3, CUD2 X162, USS protocol, Word 4 = Jog 8 Index .08 K9004

 Loading...
Loading...