Connections
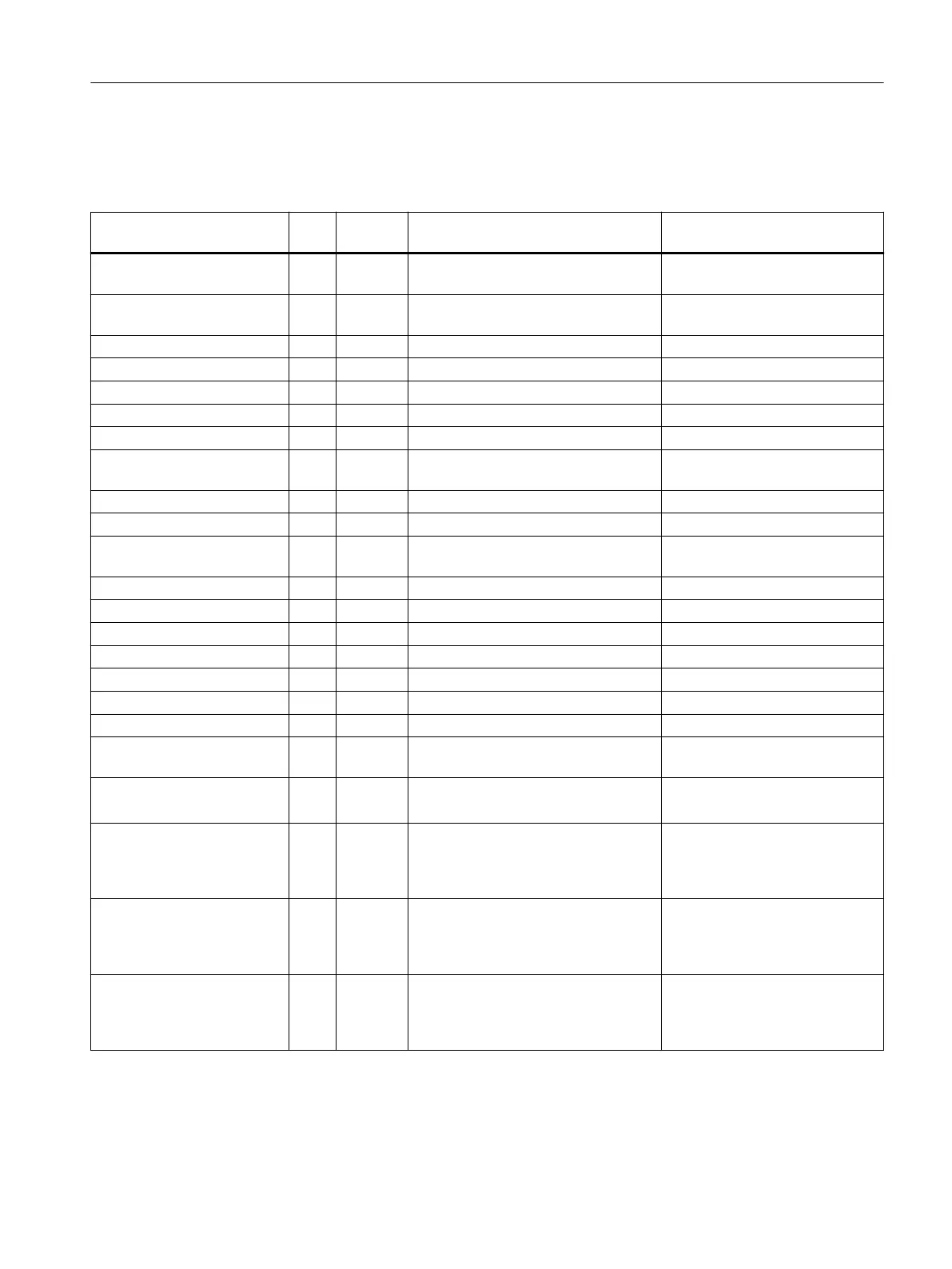
Table 3-12 Block DCC_SCTLS2
Name Type Data
type
Unit-global variables of "AddOn" Meaning
BCOMMAND_WORD1 IN UINT tls_cw1 Control word 1 (see the table be‐
low)
BCOMMAND_WORD2 IN UINT tls_cw2 Control word 2 (see the table be‐
low)
RPOS_SKEWAXIS IN LREAL TO: positioningstate.actualposition Actual position of skew drive
RPOS_A IN LREAL tls_rpos_a Actual positions of cylinder A
RPOS_B IN LREAL tls_rpos_b Actual positions of cylinder B
RPOS_C IN LREAL tls_rpos_c Actual positions of cylinder C
RPOS_D IN LREAL tls_rpos_d Actual positions of cylinder D
ISKEW_ANGLE_EXT IN DINT tls_iskew_angle_ext External skew position for the
TLS mode "TLS positioning"
RSKEWPOS_SET IN LREAL tls_rskewpos_set Set position of skew drive
- IN - Reserved
BSTATUS_WORD1 OUT UINT tls_sw1 Status word 1
(see the table below)
BSPEED_A_NORM OUT UINT tls_bspeed_a_norm Output velocity cylinder A
BSPEED_B_NORM OUT UINT tls_bspeed_b_norm Output velocity cylinder B
BSPEED_C_NORM OUT UINT tls_bspeed_c_norm Output velocity cylinder C
BSPEED_D_NORM OUT UINT tls_bspeed_d_norm Output velocity cylinder D
IPOS_ACT_TRIM OUT DINT tls_ipos_act_trim Actual position trim
IPOS_ACT_LIST OUT DINT tls_ipos_act_list Actual position list
IPOS_ACT_SKEW OUT DINT tls_ipos_act_skew Actual position skew
IANGLE_OSZ_SKEW OUT DINT tls_iangle_osz_skew Internal model for skew oscilla‐
tion angle [cgr]
BSPEED_SKEWAX‐
IS_NORM
OUT INT tls_bspeed_skewaxis_norm Output velocity of skew drive
normalized with P332 and P325
RSPEED_A OUT LREAL If the normalized value is used, this in‐
terconnection is not required.
Output velocity of cylinder A in
mm/s
(DCC output only, not included in
PROFINET interface)
RSPEED_B OUT LREAL If the normalized value is used, this in‐
terconnection is not required.
Output velocity of cylinder B in
mm/s
(DCC output only, not included in
PROFINET interface)
RSPEED_C OUT LREAL If the normalized value is used, this in‐
terconnection is not required.
Output velocity of cylinder C in
mm/s
(DCC output only, not included in
PROFINET interface)
Overview of the software
3.3 Sway control function blocks
SC integrated STS, GSU
Operating Instructions, 07/2019, A5E48271265B AA 49
 Loading...
Loading...