8.13 Manual Tuning
8.13.2 Compatible Adjustment Functions
8-86
Torque Feedforward and Speed Feedforward
You can use the torque feedforward and speed feedforward functions to help shorten the posi-
tioning time. The reference is created from the differential of the position reference at the host
controller.
Torque feedforward:This is effective for speed control or position control. It is sent from the
host controller along with the speed reference. Connect the speed refer-
ence from the host controller to the V-REF (CN1-5 and CN1-6) signal and
the torque feedforward reference from the host controller to the T-REF
(CN1- 9 and CN1-10) signal.
Speed feedforward:This is effective only for position control. It is sent to the SERVOPACK from
the host controller along with the position reference. Connect the position
reference from the host controller to the PULS and SIGN (CN1-7,CN1 -8,
CN1-11, and CN1-12) signals and the speed feedforward reference from
the host controller to the V-REF (CN1-5 and CN1-6) signal.
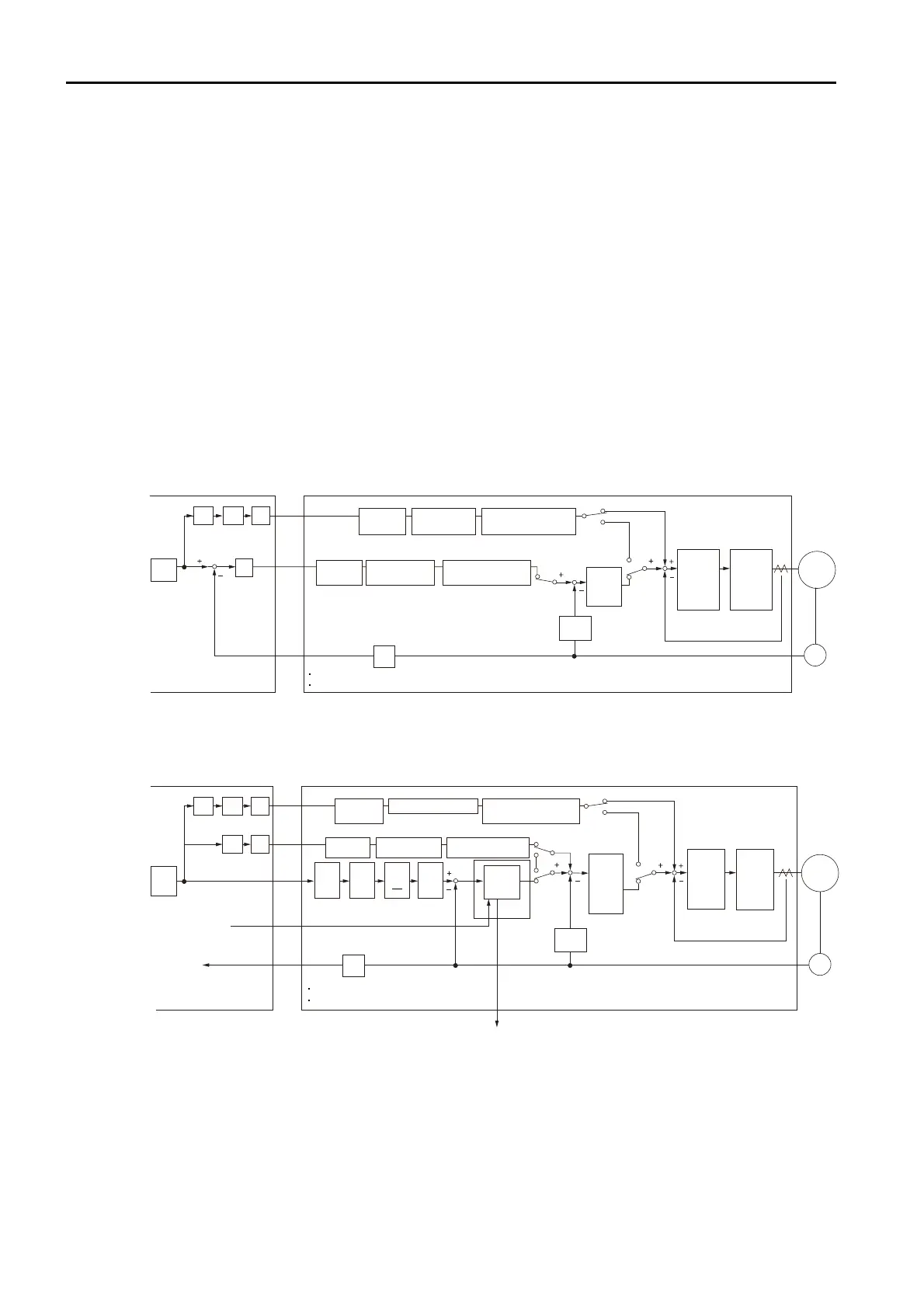
Examples of Connections to Host Controllers
When SERVOPACK Performs Speed Control
When SERVOPACK Performs Position Control
Pn002
= n.X
Kp: Position loop gain
K
FF: Feedforward gain
Pn000
= n.X
Host controller
SERVOPACK (speed control)
M
Pn400
T-REF
V-REF
K
FF
K
P
Pn300 Pn307 Pn30C
Pn415 Pn426
ENC
Speed feedforward
average movement time
Encoder
divided pulse
output
Linear Servomotor: Pn281
Rotary Servomotor: Pn212
Divider
Speed feedback
Speed
conversion
Current feedback
Current
control
section
Speed
control
section
Speed reference
lter time constant
Speed reference
input gain
Torque reference
input gain
T-REF lter time
constant
Torque feedforward
average movement time
Power
amplier
Servomotor
Position
reference
Differ-
ential
Differ-
ential
Host controller
COIN
M
Pn400
T-REF
V-REF
CLR
K
FF
Pn300 Pn307 Pn30C
Pn415 Pn426
ENC
Pn218
Pn20E
Pn210
Pn216
Pn217
K
FF
Servomotor
Power
amplier
Pn522
Positioning
completed width
PULS, SIGN
B
A
Pn200
= n.X
Pn000
= n.
X
Pn000
= n.X
Pn002
= n.
X
Differ-
ential
Clear signal
input
Encoder divided
pulse output
K
FF
: Feedforward gain
Linear Servomotor: Pn281
Rotary Servomotor: Pn212
Divider
Position
feedback
Speed feedback
Current feedback
Current
control
section
Speed
control
section
Position control
section
Deviation
counter
Smoo-
thing
Electronic
gear
Reference
pulse input
multiplier
Refer-
ence
pulse
form
Speed feedforward
average movement time
Speed reference
lter time constant
Speed reference
input gain
Torque feedforward
average movement time
T-REF lter time constant
Torque reference
input gain
SERVOPACK (position control)
Speed
conversion
Position
reference
Differ-
ential
Differ-
ential

 Loading...
Loading...



