6.1 Alarm Displays
6.1.2 Troubleshooting Alarms
6-15
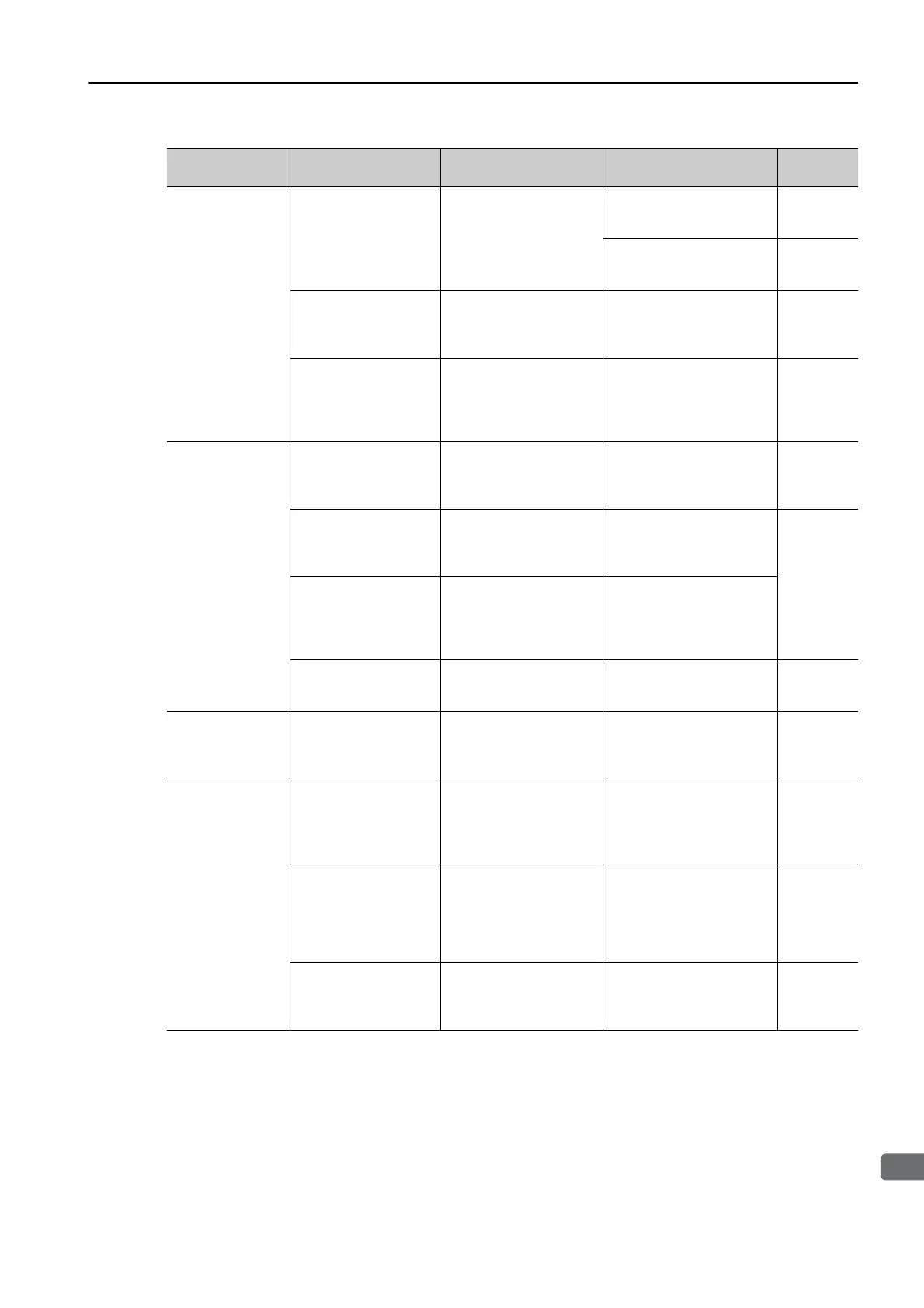
A.50D:
Position Devia-
tion Between
Axes Overflow
Alarm
Twisting of mechani-
cal parts has occurred
between axes A and
B.
Check the position
deviation between the
axes.
Resolve the twisting of
mechanical parts between
the axes.
–
Set the Position Correc-
tion Table to appropriate
values.
page 3-7
Axis A and axis B are
not synchronized with
the reference.
Check the reference
position for axis A and
axis B.
The host controller should
command the system to
synchronize operation of
axis A and axis B.
–
Pn66A (Position Devi-
ation Between Axes
Overflow Alarm Level)
is low for the operat-
ing conditions.
Check if Pn66A (Posi-
tion Deviation Between
Axes Overflow Alarm
Level) is appropriate.
Set Pn66A to an appropri-
ate value.
page 5-3
A.510:
Overspeed
(The motor
exceeded the
maximum speed.)
The order of phases
U, V, and W in the
motor wiring is not
correct.
Check the wiring of the
Servomotor.
Make sure that the Servo-
motor is correctly wired.
–
A reference value that
exceeded the over-
speed detection level
was input.
Check the input refer-
ence.
Reduce the reference
value. Or, adjust the gain.
−
The motor exceeded
the maximum speed.
Check the waveform of
the motor speed.
Reduce the speed refer-
ence input gain and
adjust the servo gain. Or,
reconsider the operating
conditions.
A failure occurred in
the SERVOPACK.
–
The SERVOPACK may be
faulty. Replace the
SERVOPACK.
–
A.51A:
Synchronized
Stopping Over-
speed Alarm
The axis undergoing
synchronized stop-
ping was accelerating.
Check the feedback
speed of the axis under-
going synchronized
stopping.
Remove the cause of
acceleration for the axis
undergoing synchronized
stopping.
–
A.520:
Vibration Alarm
Abnormal oscillation
was detected in the
motor speed.
Check for abnormal
motor noise, and check
the speed and torque
waveforms during oper-
ation.
Reduce the motor speed.
Or, reduce the setting of
Pn100 (Speed Loop
Gain).
*1
The setting of Pn103
(Moment of Inertia
Ratio) is greater than
the actual moment of
inertia or was greatly
changed.
Check the moment of
inertia ratio or mass
ratio.
Set Pn103 (Moment of
Inertia Ratio) to an appro-
priate value.
*1
The vibration detec-
tion level (Pn312 or
Pn384) is not suitable.
Check that the vibra-
tion detection level
(Pn312 or Pn384) is
suitable.
Set a suitable vibration
detection level (Pn312 or
Pn384).
*1
Continued on next page.
Continued from previous page.
Alarm Number:
Alarm Name
Possible Cause Confirmation Correction Reference

 Loading...
Loading...







