Configuration Mode (ConF)
Function parameters
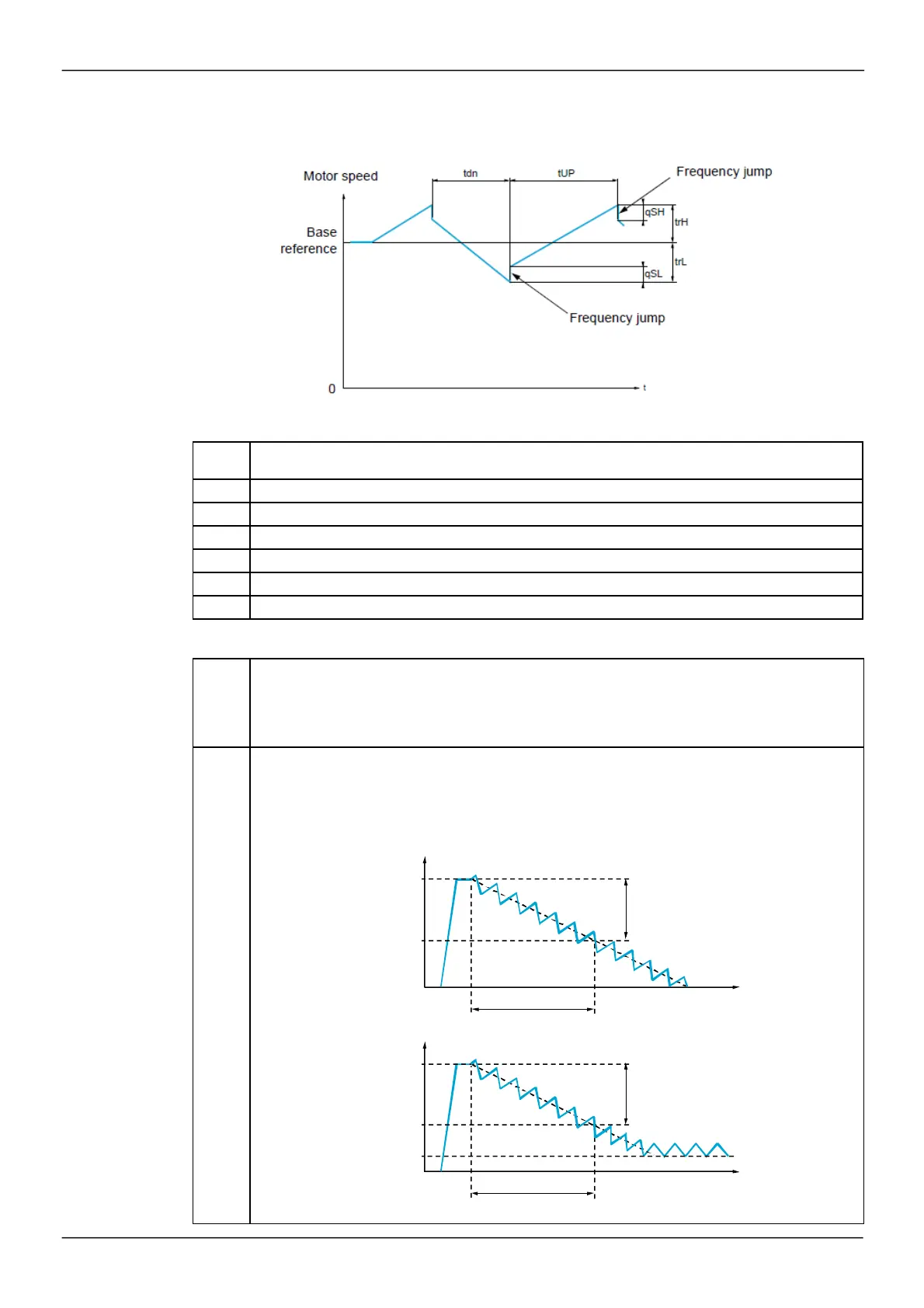
Thes e define the cycle of frequency variations around the bas e reference, as s hown in the diagram below:
Motor speed
Base
referenc e
tdn tUP
Frequency jump
0
trC
[Yarn control]
(trC):
Assignment of the traverse control command to a logic input or to a
communication bus control w ord bit
trH
[Trave rse fre q. high]
(trH):
in Hertz
trL
[Trave rs e
Freq.
Low]
(
trL
):
in
Hertz
qSH
[Quick ste p High]
(qSH): in Hertz
qSL
[Quick ste p Low ]
(qSL): in Hertz
tUP
[Trave rse ctrl. accel.]
(tUP): time, in seconds
tdn
[Trave rse ctrl. de ce l]
(tdn):
time, in seconds
Reel param eters :
tbO
[Reel
time]
(
tb
O
):
Time taken to make a reel, in minutes.
This parameter is intended to signal the end of w inding. When the traverse control operating time since
command
[Yarn control]
(trC)
reaches the value of
[Reel tim e ]
(tbO), the logic output or one of the relays
changes to state 1, if the corresponding function
[End reel]
(EbO) has been assigned.
The traverse control operating time
EbOt
can be monitored online by a communication bus.
dtF
[Decreas e ref. speed]
(dtF):
Decrease in the base reference.
In certain cases, the base reference has to be reduced as the reel increases in size. The
[Decreas e re f. s pe e d]
(dtF)
value corresponds to time
[Reel tim e]
(tbO). Once this time has elapsed, the
reference continues to fall, follow ing the same ramp. If low speed
[Low s pe e d]
(LSP)
is at 0, the speed
reaches 0 Hz, the drive stops and must be reset by a new run command.
If low speed
[Low spe e d]
(LSP) is not 0, the traverse control function continues to operate above
[Low spe e d]
(LSP).
Motor speed
Base reference
dtF
With LSP = 0
0 t
tbO
Motor speed
Base reference
dtF
With LSP > 0
LSP
0
t
tbO
 Loading...
Loading...
