Configuration Mode (ConF)
Process overload detected fault
A proces s overload is detected when the next event occurs and rem ains pending for a m inim um tim e
[Ovld Time Detect.]
(tOL), which is configurable:
•
The drive is in current lim itation m ode.
•
The m otor is in s teady state and the current is above the s et overload thres hold
[Ovld Detection Thr.]
(LOC).
The m otor is in s teady s tate when the offset between the frequency reference and motor frequency falls below
the configurable thres hold
[Hysteresis Freq. Att.]
(Srb).
A relay or a logic output can be ass igned to the signaling of this detected fault in the
[INPUTS / OUTPUTS CFG]
(
I_
O-) m enu.
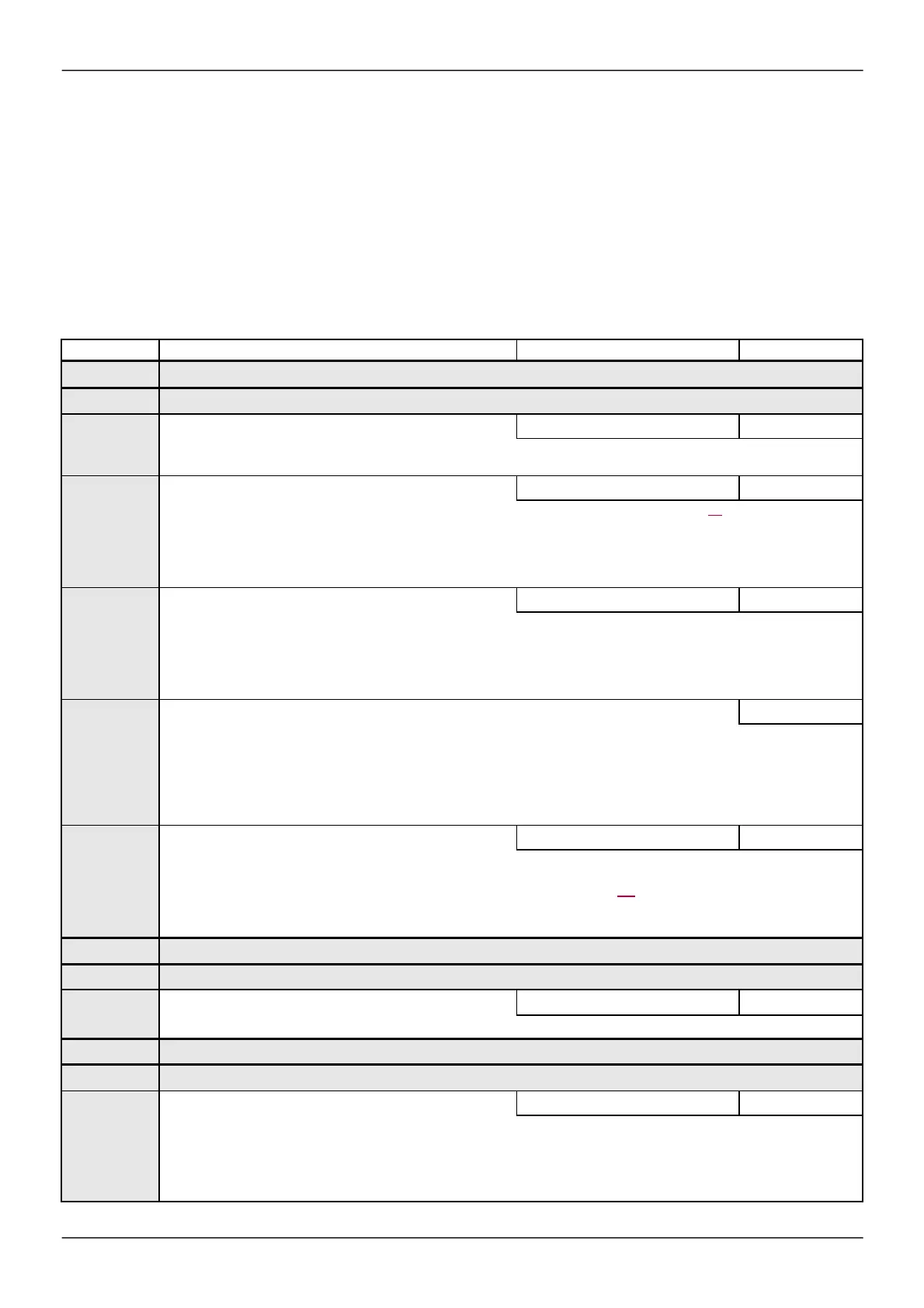
Code Nam e / De s cription Adjustment range Factory setting
tOL
[Ovld Time Detect.]
0 to 100 s 0 s
Overload detection time delay.
A value of 0 deactivates the function and makes the other parameters inaccessible.
LOC
*
(1)
[Ovld Detection Thr.]
70 to 150% 110%
Overload detection threshold, as a % of the rated motor current
[Rated m ot. current]
(nCr)
page 86. This value must be less
than the limit current in order for the function to w ork.
Srb
*
(1)
[Hysteresis Freq.Att.]
0 to 599 Hz 0.3 Hz
Maximum deviation betw een the frequency reference and the motor frequency, which defines steady state operation.
OdL
*
nO
YES
FSt
[Ovld.Proces.Mngmt]
[Freew heel]
(YES)
Behavior on sw itching to overload detection.
[Ignore ]
(nO): Detected fault ignored
[Freew heel]
(YES): Freew heel stop
[Ram p s top]
(rMP): Stop on ramp
[Fast s top]
(FSt): Fast stop
FtO
*
(1)
[Overload T.B.Rest.]
0 to 6 min 0 min
This parameter cannot be accessed if
[Ovld.Proces.Mngmt]
(OdL) is set to
[Ignore]
(nO).
Minimum time permitted betw een an overload being detected and any automatic restart.
In
order
to
allow
an
automatic
restart,
the
value
of
[Max.
resta rt
time]
(
tAr
)
page
252
must
exceed
this
paramet er
by
at
least
one minute.
LFF
[Fallback speed]
0 to 599 Hz 0 Hz
Selection of the fallback speed.
dCF
*
(1)
[Ramp divider]
0 to 10
4
The ramp that is enabled (
[Dece leration]
(dEC) or
[Dece leration 2]
(dE2)) is then divided by this coefficient when stop
requests are sent.
Value 0 corresponds to a minimum ramp time.

 Loading...
Loading...