Operation
DeLaval voluntary milking system VMS
94897201.pdf2007-12-18
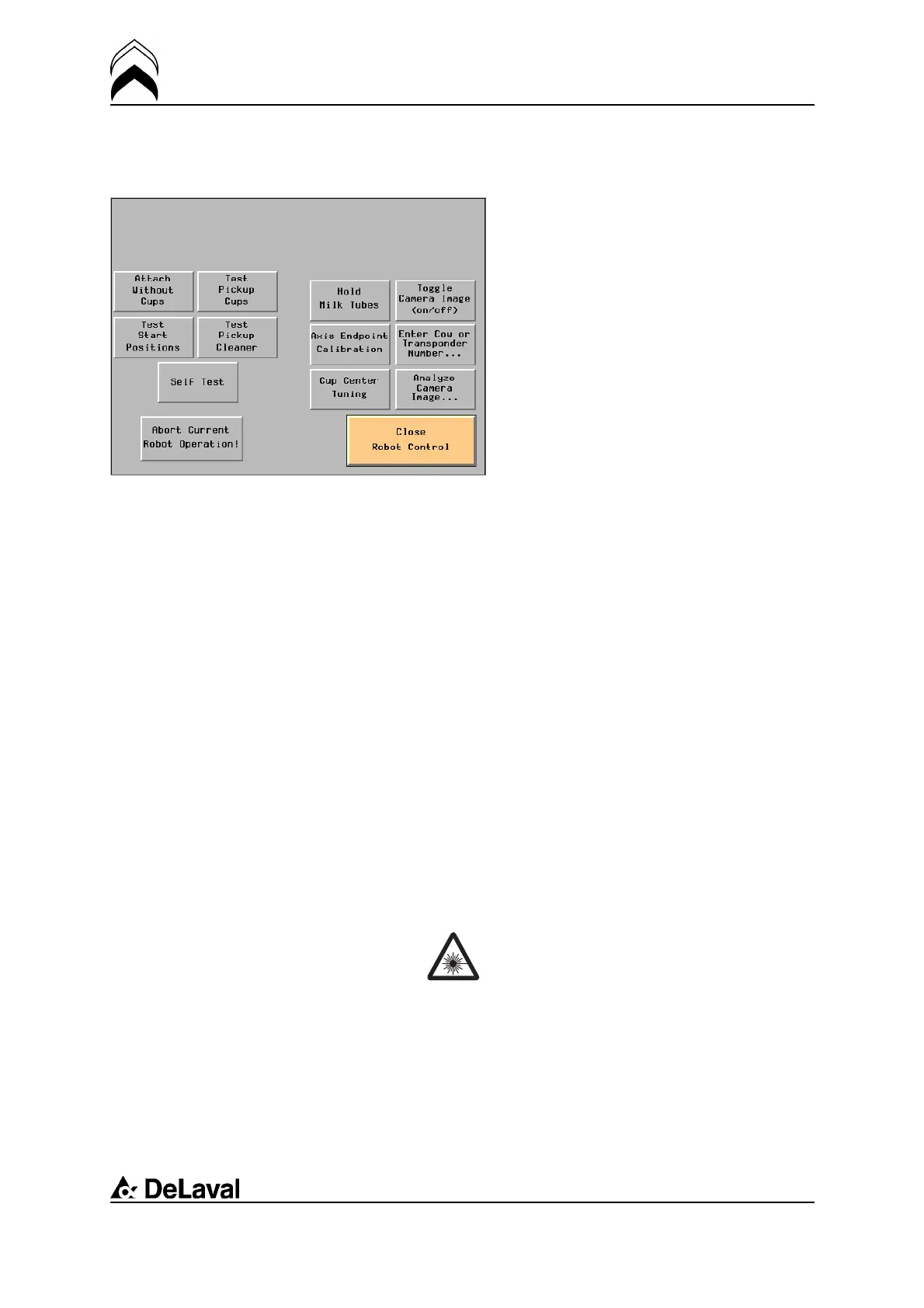
Robot control window
Note: Ensure that the station is in manual
mode.
Note: To stop the multi-purpose arm during
any of these tests, press the VMS > Robot
Control > Abort Current Robot Operation
buttons.
Note: These operations are performed with
the safety switch in working mode.
To verificate of the determined positions, go
to the Robot control window by pressing the
VMS > Robot control buttons.
Verifying the positions of the
teatcups
In this test, the arm moves to the magazine,
picks up each teatcup and releases it.
- Press the Test Pickup Cups button.
Verifying the position of the teat
preparation cup
In this test, the arm fetches the teat
preparation cup, pulls it out, then releases it.
- Press the Test pickup cleaner button.
Verifying the teat positions
In this test, the arm moves to the teat
positions of an identified cow.
————————————————————
Warning: One of the lasers is used during
this test. Do not stare into the beam.
————————————————————
93(198)