Operation
DeLaval voluntary milking system VMS
94897201.pdf2007-12-18
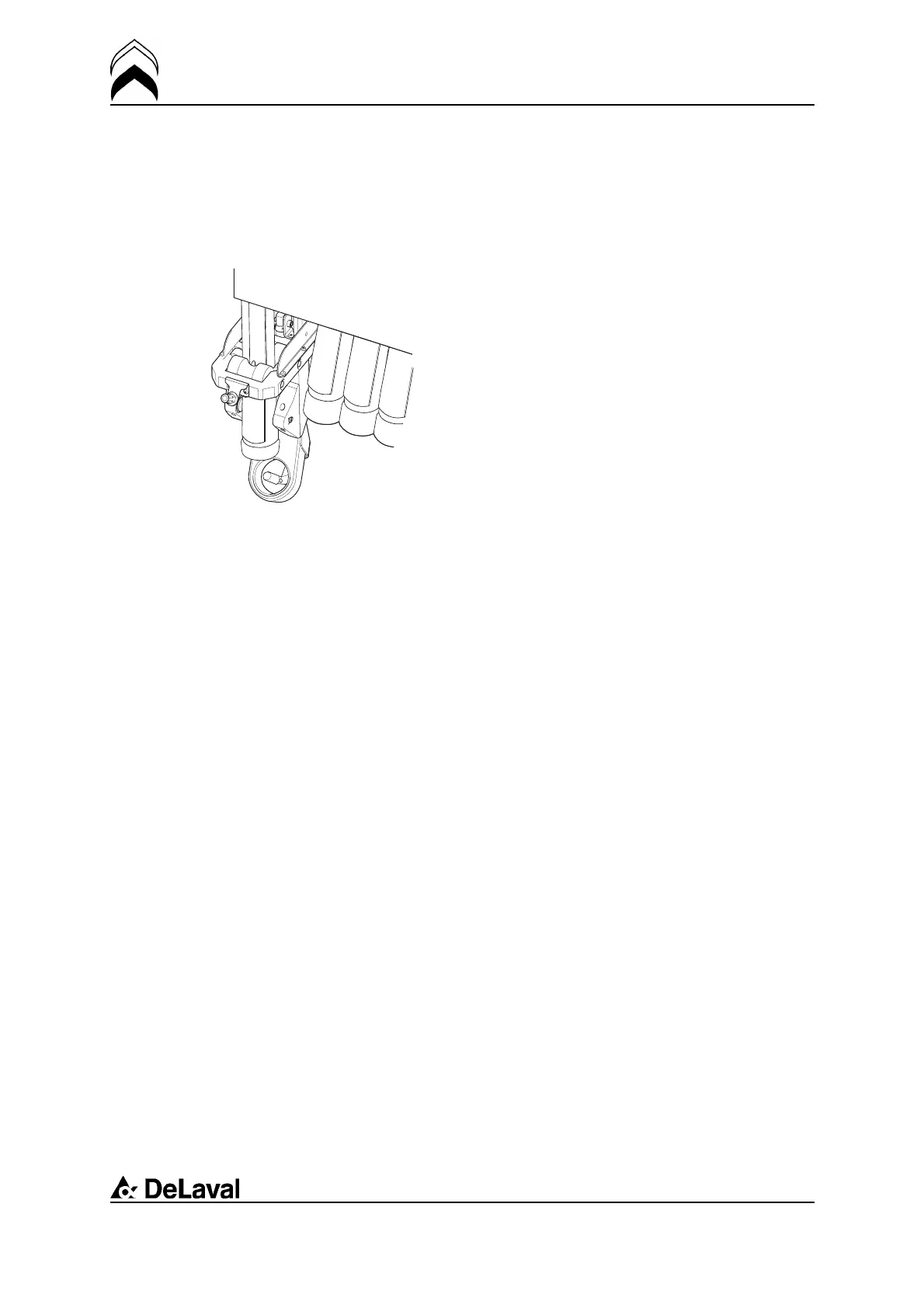
Determining the position of the teat
preparation cup
Note: Ensure that the station is in manual
mode.
1. Set the service switch to service mode.
2. To start the procedure, on the touch
screen press the VMS > Robot teaching >
Teach Teatcleaner Position buttons.
3. Hold the safety button on the joystick and
keep it held during the procedure.
4. Press (and release) the confirm button
OK on the joystick as the appearing pop-up
window requests.
5. Position the arm by using the joystick; the
end effector must be able to attach the teat
preparation cup.
6. Press the Confirm button OK on the
joystick.
Note: To cancel the procedure you have to
press the "Done Teaching Robot", then
"Auto" at the top of the touch screen, and
finally "Abort Current Robot op. and Enter
Manual mode" buttons.
Determining the position of the
camera cleaner (sponge)
Note: Ensure that the station is in manual
mode.
1. Set the service switch in service position.
2. To start the procedure, on the touch
screen press the VMS > Robot teaching >
Teach Camera-clean Pos. buttons.
3. Hold the safety button on the joystick and
keep it held during the procedure.
4. Press (and release) the confirm button
OK on the joystick as the appearing pop-up
window requests.
5. Use the joystick to move the arm so that
the camera cover touches the sponge.
6. Press the Confirm button OK on the
joystick.
85(198)