Operation
DeLaval voluntary milking system VMS
94897201.pdf2007-12-18
Miscellaneous tasks
The following tasks are performed during
service or when the system operation has
stopped, for example, because of a power
failure.
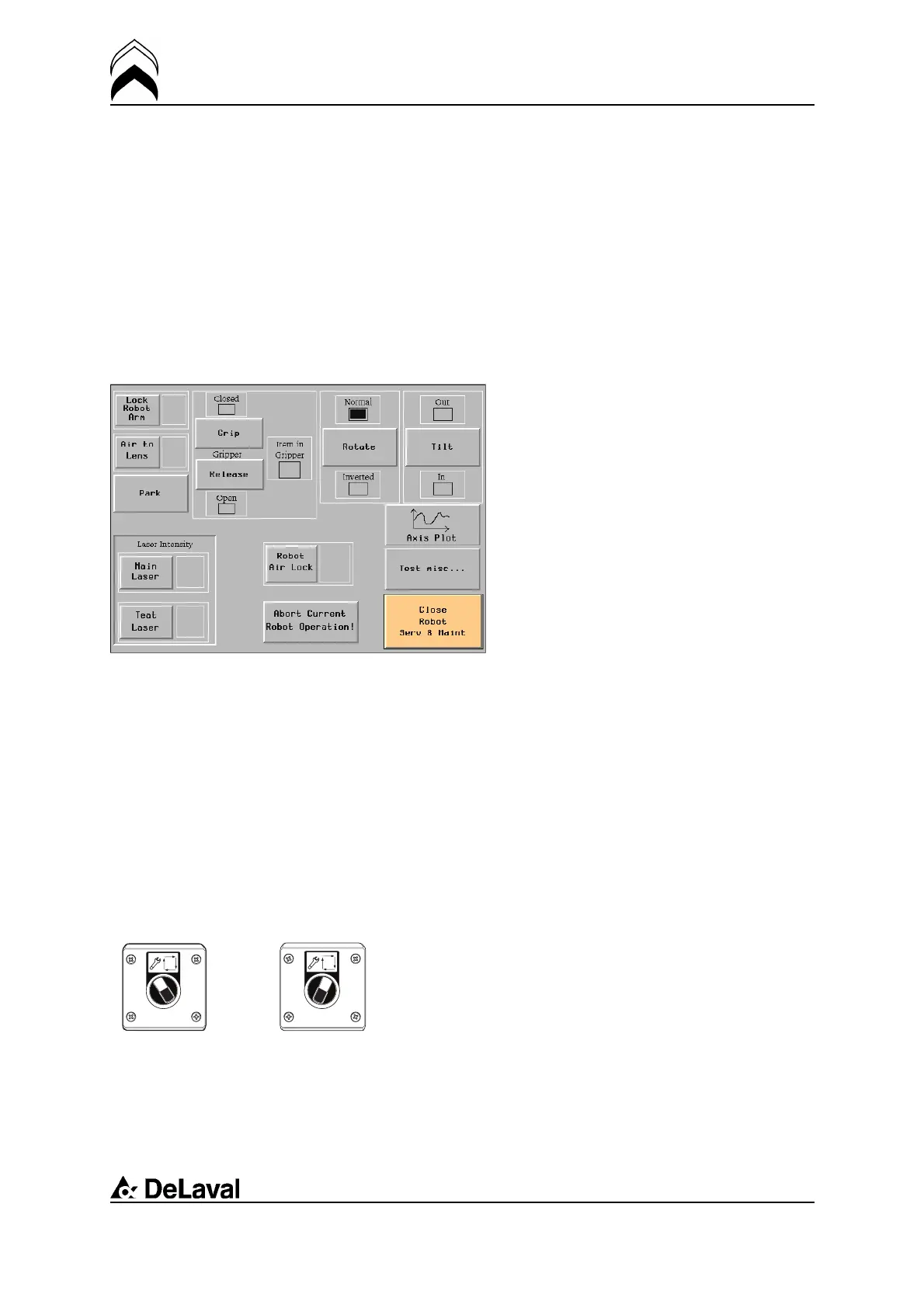
Parking the multi-purpose arm
Robot service window
Parking the multi-purpose arm can be done
either by stopping the arm when it is in
automatic mode or using the parking
function in the Robot service window (see
the section “Stopping the multi-purpose
arm” above). In some cases, however, the
arm may fail to go to its home position when
it has been stopped. If this happens, use
the parking function to send the arm to its
home position.
Note: Ensure that the station is in manual
mode.
On the touch screen:
1. Press the VMS button in the top right
corner. This will display the VMS menu.
2. Press the Robot service button. This will
display the Robot service window.
3. Press the Park button. This will park the
multi-purpose arm.
4. Press the Close Robot Serv & Maint
button to close the window.
Note: The multi-purpose arm can not move
if the service switch is in service mode.
Setting the multi-purpose arm to
service mode
Service mode Working mode
The multi-purpose arm is deactivated by
setting the service switch to service mode.
51(198)