Chapter 4 Parameters|
4-166 Revision Jan. 2009, 06EE, SW--PW V1.12/CTL V2.12
Fmin
Fsleep
Fcmd=0
Fout = 0
lower bound
of frequency
Fmin<Fsleep<
lower bound
of frequency
When Pr. 01.05min. output frequency ≦ PID frequency (H) ≦ Pr.01.08 lower bound of
frequency and sleep function is enabled (output frequency (H) < Pr.10.15 sleep frequency and
time > Pr.10.14 detection time), frequency will be 0 (in sleep mode). If sleep function is
disabled, output frequency(H) = Pr.01.08 lower bound frequency.
NOTE
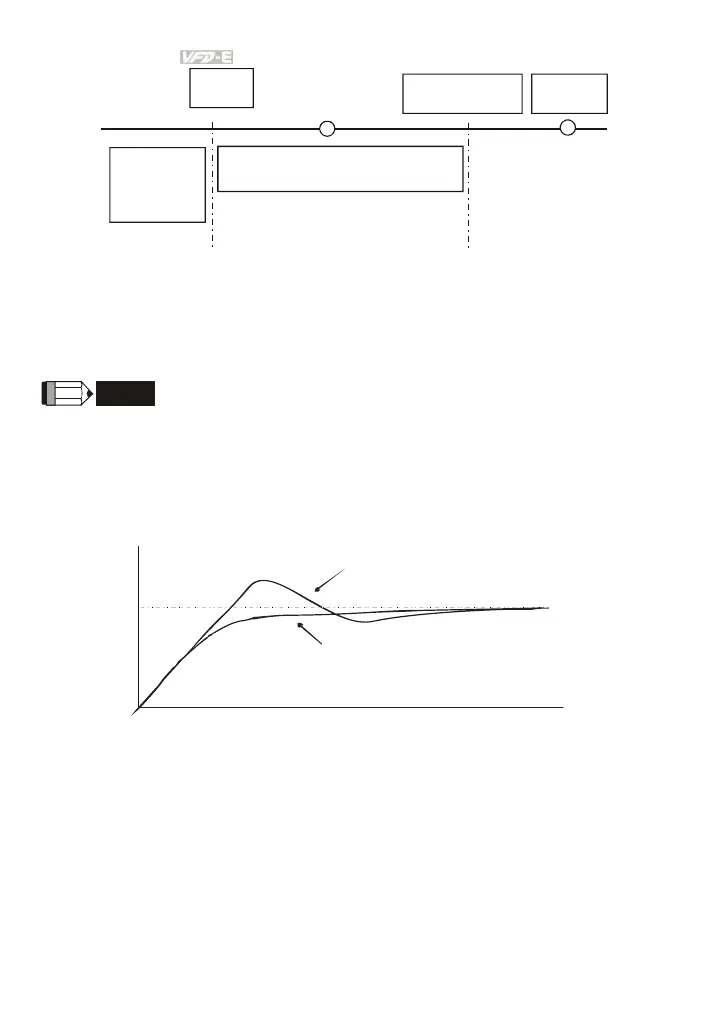
The common adjustments of PID control are shown as follows:
Example 1: how to have stable control as soon as possible?
Please shorten Pr.10.03 (Integral Time (I)) setting and increase Pr,10.04(Differential Control (D))
setting.
Respons
Time
before adjustment
after adjustment
Example 2: How to suppress the oscillation of the wave with long cycle?
If it is oscillation when the wave cycle is longer than integral time, it needs to increase Pr.10.03
setting to suppress the oscillation.