Chapter 4 Parameters|
Revision Jan. 2009, 06EE, SW--PW V1.12/CTL V2.12 4-177
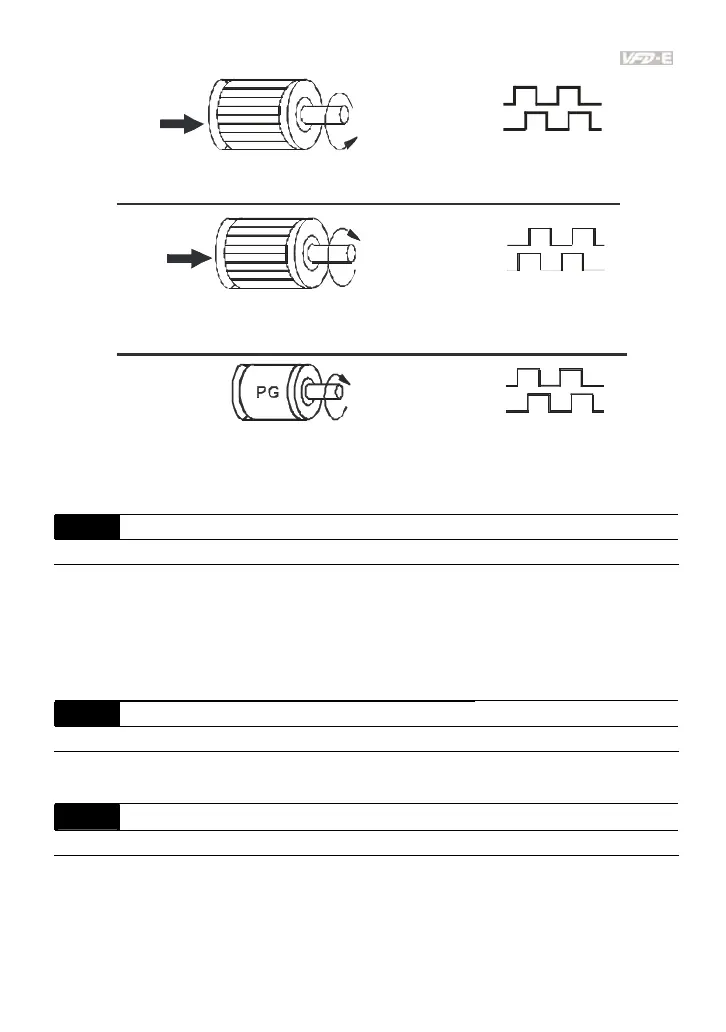
13.00=3
FWD
CCW
13.00=2
phase leads B phase
A phase
B phase
PULSE
GENERATOR
A phase
B phase
CW
REV
CW
A phase
B phase
B phase leads A phase
When receiving a forward command, motor will rotate in
counterclockwise direction (see from output side).
When receiving a rev erse command, motor will rotate i n
clockwise direction (see from output side).
When encoder rotates in clockwise direction (see from input side).
At this moment, A phase leads B phase.
13.01 PG Pulse Range Unit: 1
Settings 1 to 20000 Factory Setting: 600
A Pulse Generator (PG) is used as a sensor that provides a feedback signal of the motor
speed. This parameter defines the number of pulses for each cycle of the PG control.
This parameter setting is the resolution of encoder. With the higher resolution, the speed
control will be more precise.
13.02 Motor Pole Number (Motor 0) Unit: 1
Settings 2 to 10 Factory Setting: 4
The pole number should be even (can’t be odd).
13.03 Proportional Gain (P) Unit: 0.01
Settings 0.0 to 10.0 Factory Setting: 1.0
This parameter is used to set the gain (P) when using PG for the closed-loop speed control.
The proportional gain is mainly used to eliminate the error. The large proportional gain(P) will
get the faster response to decrease the error. Too large proportional gain will cause large
overshoot and oscillation and decrease the stable.