C4 Maintenance 16. Calibration
164 C Series Maintenance Manual Rev.2
For details on Jog & Teach, refer to EPSON RC+ User’s Guide 5.11.1 Robot Manager
Command Tools: Robot Manager: Jog and Teach Page.
- For details about the basic pose, refer to C Series Manual C4 Manipulator 3.7 Checking
the Basic orientation.
- Whenever possible, calibrate one joint at a time. (Also, replace parts of one joint at a time
whenever possible.) If you calibrate the origins for multiple joints simultaneously, it will
be more difficult to verify their origins and obtain the origin correct positions.
However, joint #5 cannot be calibrated alone due to the structure of the Manipulator. Make
sure you calibrate joint #5 and #6 at the same time.
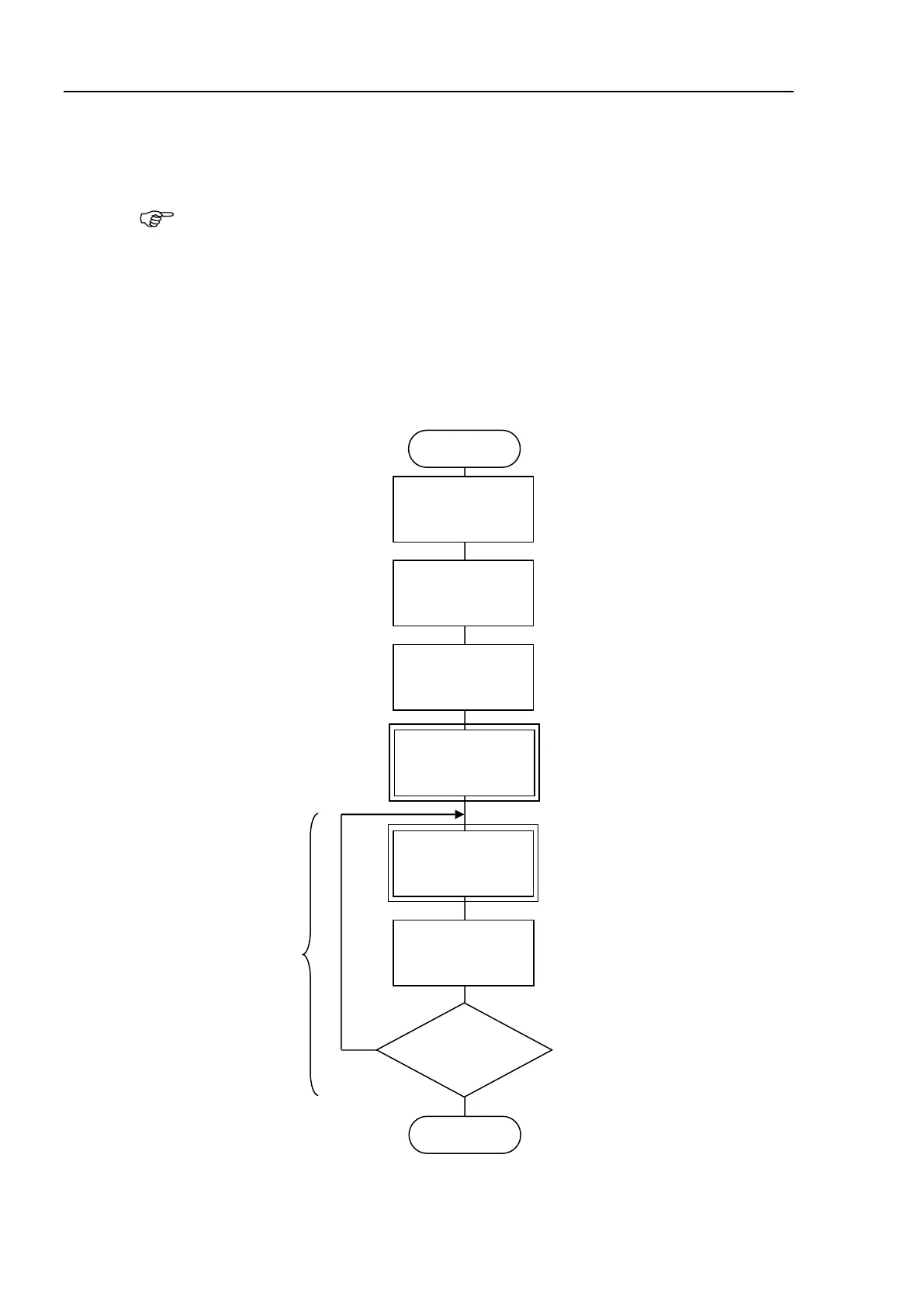
Calibration Flowchart
4. Calibration
Yes
Start
1. Basic Pose
Confirmation
2. Part Replacement
3. Encoder
Initialization
6. Accuracy Testing
Re-calibrate?
End
No
····························
More accurate positioning
5. Calibration
Carry out these
procedures if necessary

 Loading...
Loading...






