Setup & Operation 12. I/O Remote Settings
RC700 / RC700-A Rev.23 73
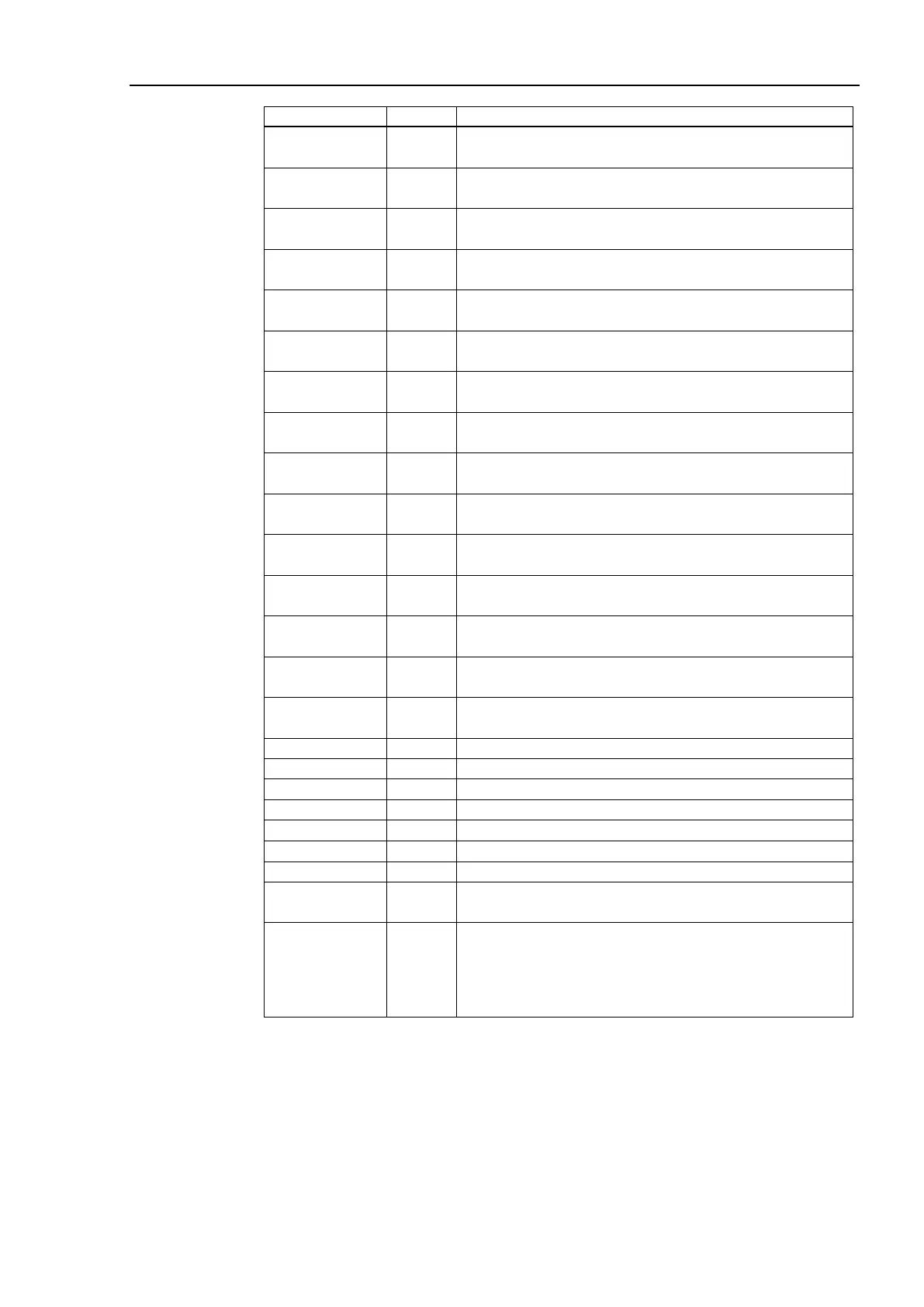
Alarm1
Not set
Turns ON when a battery alarm of the controller is
occurring.
Alarm2
Not set
Turns ON when a battery alarm of the robot connected to
CU is occurring.
Alarm3
Not set
Turns ON when a grease alarm of the robot connected to CU
is occurring. (*10)
Alarm4
Not set
Turns ON when a battery alarm of the robot connected to
DU1 is occurring.
Alarm5
Not set
Turns ON when a grease alarm of the robot connected to
DU1 is occurring. (*10)
Alarm6
Not set
Turns ON when a battery alarm of the robot connected to
DU2 is occurring.
Alarm7
Not set
Turns ON when a grease alarm of the robot connected to
DU2 is occurring. (*10)
Alarm8
Not set
Turns ON when a battery alarm of the robot connected to
DU3 is occurring.
Alarm9
Not set
Turns ON when a grease alarm of the robot connected to
DU3 is occurring. (*10)
PositionX Not set
Outputs current X coordinate in the World coordinate
system (*6) (*7)
PositionY Not set
Outputs current Y coordinate in the World coordinate
system (*6) (*7)
PositionZ Not set
Outputs current Z coordinate in the World coordinate system
(*6) (*7)
PositionU Not set
Outputs current U coordinate in the World coordinate
system (*6) (*7)
PositionV Not set
Outputs current V coordinate in the World coordinate
system (*6) (*7)
PositionW Not set
Outputs current W coordinate in the World coordinate
system (*6) (*7)
Outputs the current torque value of Joint #1 (*6) (*7)
Outputs the current torque value of Joint #2 (*6) (*7)
Outputs the current torque value of Joint #3 (*6) (*7)
Outputs the current torque value of Joint #4 (*6) (*7)
Outputs the current torque value of Joint #5 (*6) (*7)
Outputs the current torque value of Joint #6 (*6) (*7)
Outputs the CPU load factor of the user program (*8)
ESTOP Not set
Outputs how many times emergency stops have been
executed.
ALIVE Not set
Output signal for alive monitoring of the controller. The
signal input by ALIVE input will be output. The master
equipment can perform alive monitoring of the controller
by switching the input periodically and checking the
output signal.

 Loading...
Loading...



