Setup & Operation 12. I/O Remote Settings
72 RC700 / RC700-A Rev.23
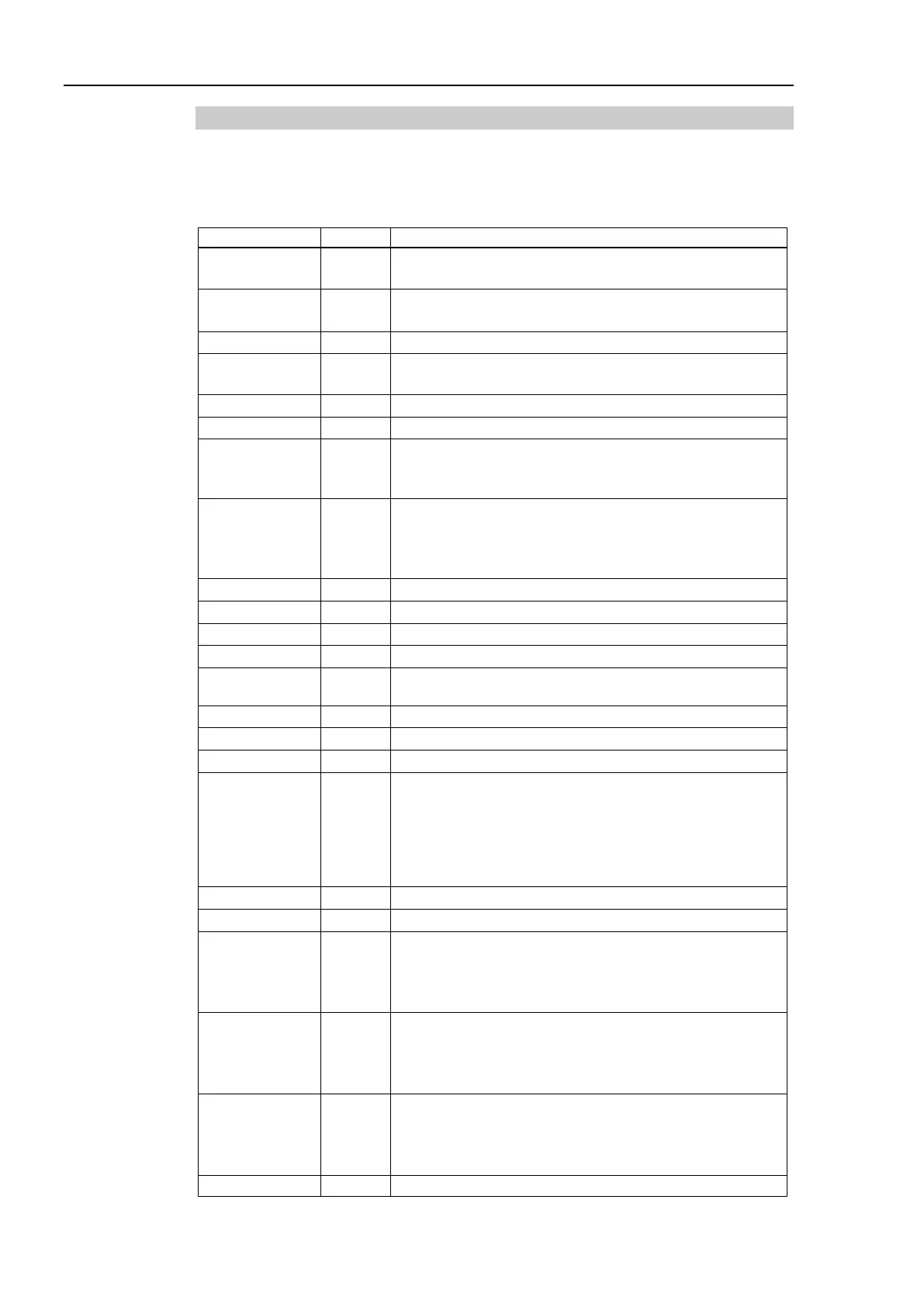
12.1.2 Remote Output Signals
Remote outputs provide status for the Manipulator and Controller.
Remote outputs provide the assigned function using with any control device. The outputs
execute automatically. Therefore, no special programming is needed.
Ready 0
Turns ON when the controller startup completes and no
task is running.
Running 1
Turns ON when task is running.
However, turns OFF when “Paused output” is ON.
Turns ON when pause task exists.
Error 3
Turns ON when an error occurs.
Use “Reset input” to recover from the error.
Turns ON at Emergency Stop.
Turns ON when the safeguard is open.
SError 6
Turns ON when critical error occurs.
When a critical error occurs, “Reset input”
function. Reboot the controller to recover.
Warning 7
Turns ON when warning occurs.
The task runs as normal with the warning. However, be
sure to eliminate the cause of the warning as soon as
possible.
Turns ON when the robot motor is ON. (*5)
Turns ON when the robot is in the home position. (*5)
Turns ON when the robot’s power mode is High. (*5)
Turns ON when the robot hasn’t executed MCal. (*5)
RecoverReqd
Not set
Turns ON when at least one robot is waiting for Recover
after the safeguard is closed.
Turns ON when at least one robot is executing Recover.
Turns ON when an input command is executing.
Turns ON when an input command cannot be accepted.
CurrProg2
CurrProg4
CurrProg8
CurrProg16
CurrProg32
Not set
Indicates the running or the last main function number
(*1)
Turns ON in remote input acceptable status. (*2)
.
.
.
ErrorCode8192
Not set
Indicates the error number.
.
.
.
InsideBox15
Not set
Turns ON when the robot is in the approach check area.
(*3)
.
.
.
InsidePlane15
Not set
Turns ON when the robot is in the approach check plane.
(*4)
Turns ON when any of the alarms is occurring. (*9)

 Loading...
Loading...



