Device concept The CrashBox Drive /i is designed specifically for fitting to the robot arm and for
holding gas-cooled and water-cooled robot hosepacks with robot drive units. For
PAP systems, the torch hosepack runs through the CrashBox and then through
the robot arm. In conventional robot systems the torch hosepack runs along the
robot arm and is attached to the clamp. In the event of a crash, the magnetic
coupling smoothly deflects the forces along a large deflection path.
Areas of utilisa-
tion
The clamp system can be used for the following PushPull robot hosepacks:
-
MHP /i G/W RD hosepacks
Information on
repairing Crash-
Boxes
NOTE!
Only send complete CrashBoxes for repair!
Incomplete CrashBoxes (e.g. without a magnetic ring) cannot be checked in the
course of a repair.
Scope of supply
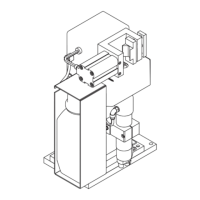
(1) (2)(3) (2)(3)(4) (5) (6)
CrashBox Drive /i PAP scope of supply
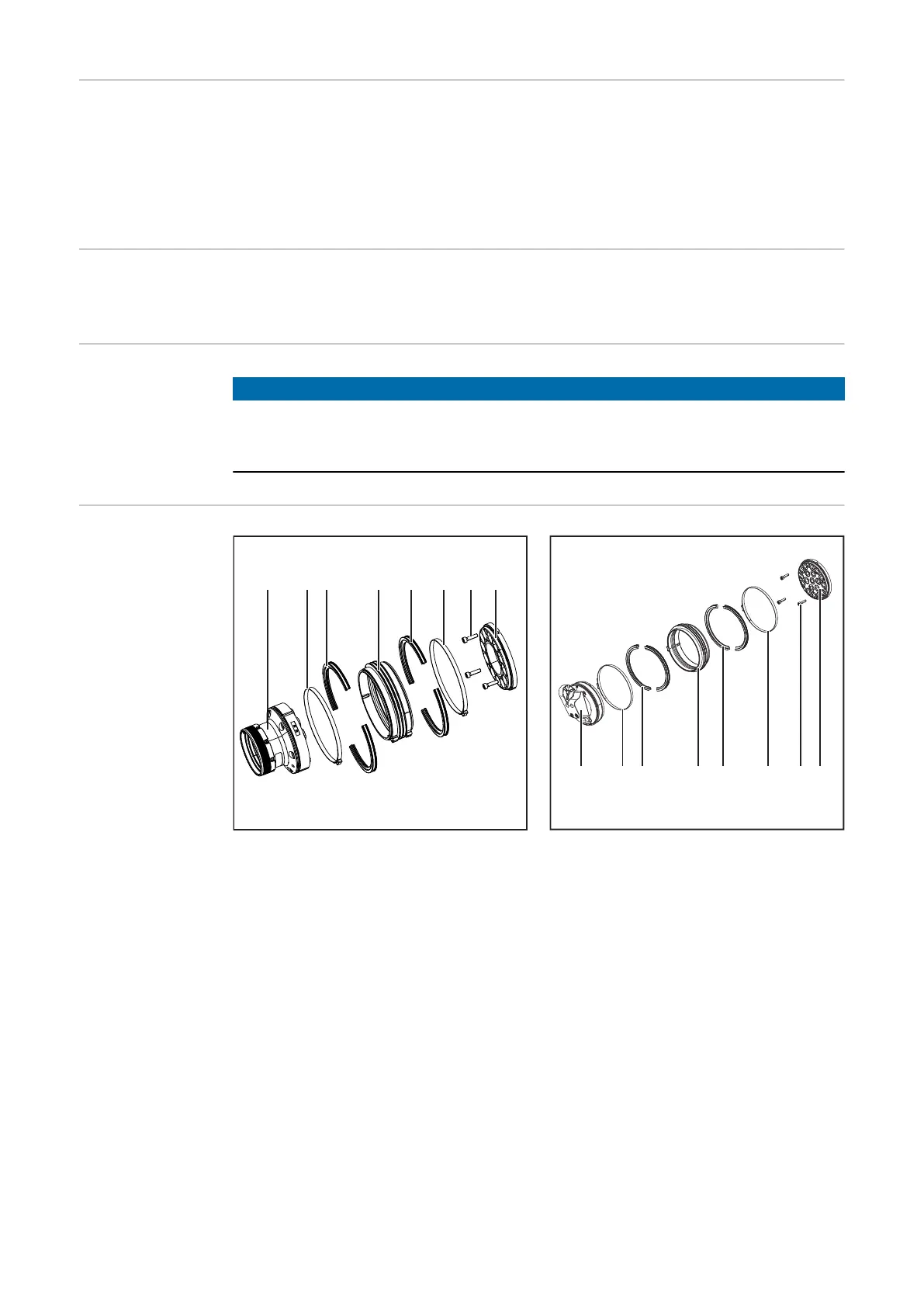
(1) (2)(3) (4) (5)(6)(2)(3)
Conventional CrashBox /i scope of supply
(1) CrashBox Drive /i holder
(2) 1-ear clamp *
(3) Locking ring, 2-part *
(4) Bellows
(5) Cheese-head screws, M4 x 16 mm
(6) Magnetic ring
* A two-part locking ring and a 1-ear clamp are supplied fitted to the bel-
lows (4).
Do not fit the CrashBox Drive /i holder (1) and magnetic ring (4) together before
fitting to the robot. The components become even more difficult to release due
to the strong magnetism.
52