62
394149/D
whileamotionsensorislocatedclosetothevessel’scentreofgravity.Bothofthese
arephysicallypositionedfarawayfromthetransduceronadepthsensor,whichmaybe
locatedclosertothebow.V eryoften,theinformationfromonesensordependsondata
fromanother.Itisthenimportantthattherelevantmeasurementsarecompensatedfor
theserelativedistances.
Example
Ifyouwishtomeasuretheactualwaterdepth,youwillneedtoknowthe
verticaldistancefromtheechosoundertransducertothewaterline.Since
thevessel’sdisplacementchangeswiththeamountofcargo,fueletc,the
physicallocationofthewaterlineonthehullmusteitherbemeasuredata
regularbasis,ormeasuredwithasecondsensor.
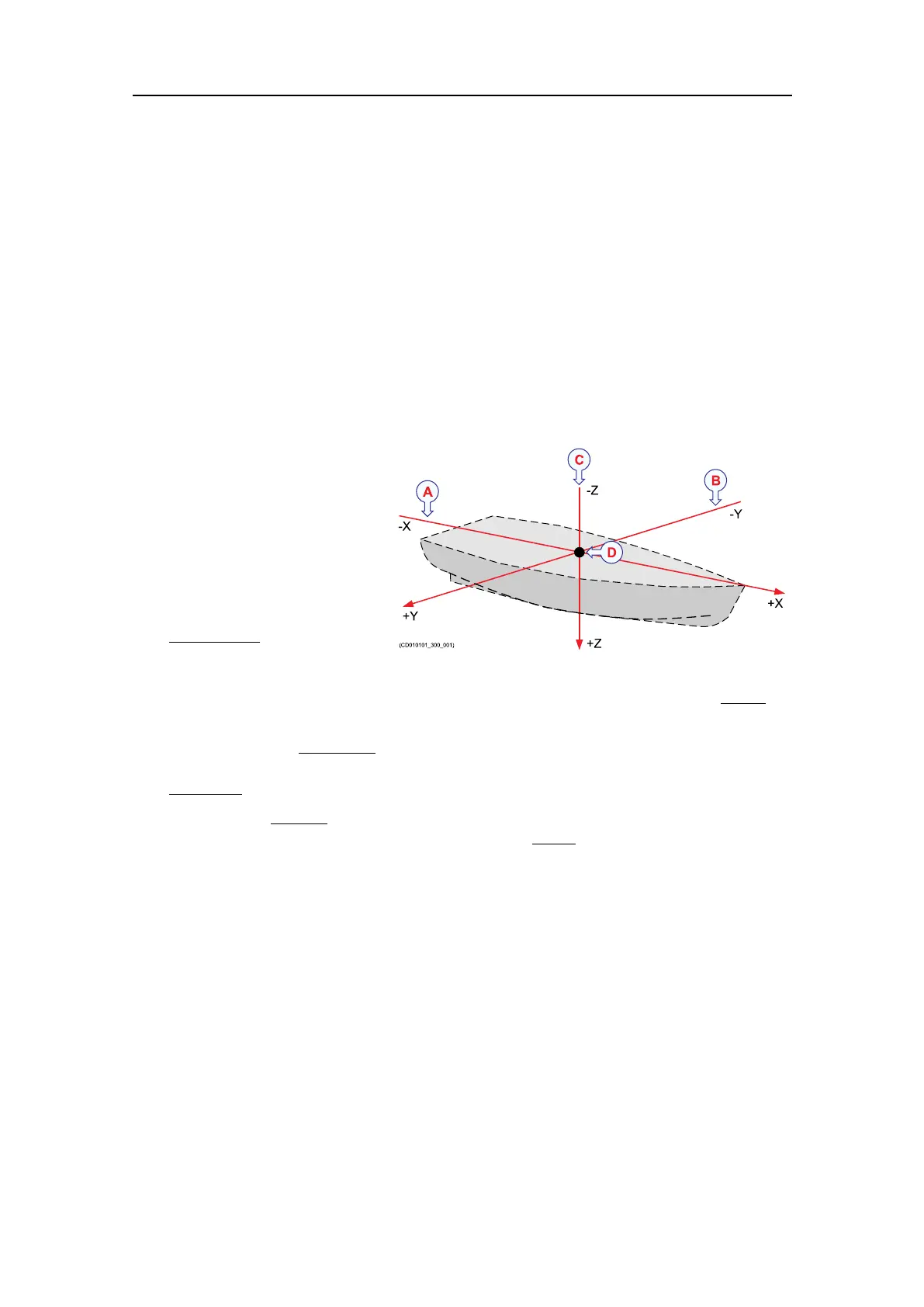
Inordertoestablishasystem
tomeasuretherelative
distancebetweensensors,a
virtualcoordinatesystemis
established.Thiscoordinate
systemusesthreevectors;X,
YandZ.
ATheX-axisisthe
longitudinal
direction
ofthevessel,andin
parallelwiththedeck.
ApositivevalueforXmeansthatasensororareferencepointislocatedahead
ofthereferencepoint(origin).
BTheY-axisisthetransverse directionofthevessel,andinparallelwiththedeck.
ApositivevalueforYmeansthatasensororareferencepointislocatedonthe
starboardsideofthereferencepoint(origin).
CTheZ-axisisvertical ,andinparallelwiththemast.ApositivevalueforZmeans
thatasensororanewreferencepointislocatedunder thereferencepoint(origin).
DReferencepoint(ShipOrigin)
Coordinatesystemorigin
Theoriginisthecommonreferencepointwhereallthreeaxisinthevesselcoordinate
systemmeet.Allphysicallocationsofthevessel’ssensors(radarandpositioning
systemantennas,echosounderandsonartransducers,motionreferenceunits,etc.)are
referencedtotheorigin.Inmostcases,thelocationofthevessel’s"ofcial"origin
hasbeendenedbythedesignerorshipyard.Thisoriginisnormallyidentiedwitha
physicalmarking,andalsoshownonthevesseldrawings.
Frequentlyusedlocationsare:
•Aftimmediatelyovertherudder(frame0)
•Vessel’scentreofgravity
•Thephysicallocationofthemotionreferenceunit(MRU)
SimradEK80InstallationManual