7. WEB Control Application
7-33
Function
Code
Loader
Display
Name of Function Set Range Unit
Factory
Default
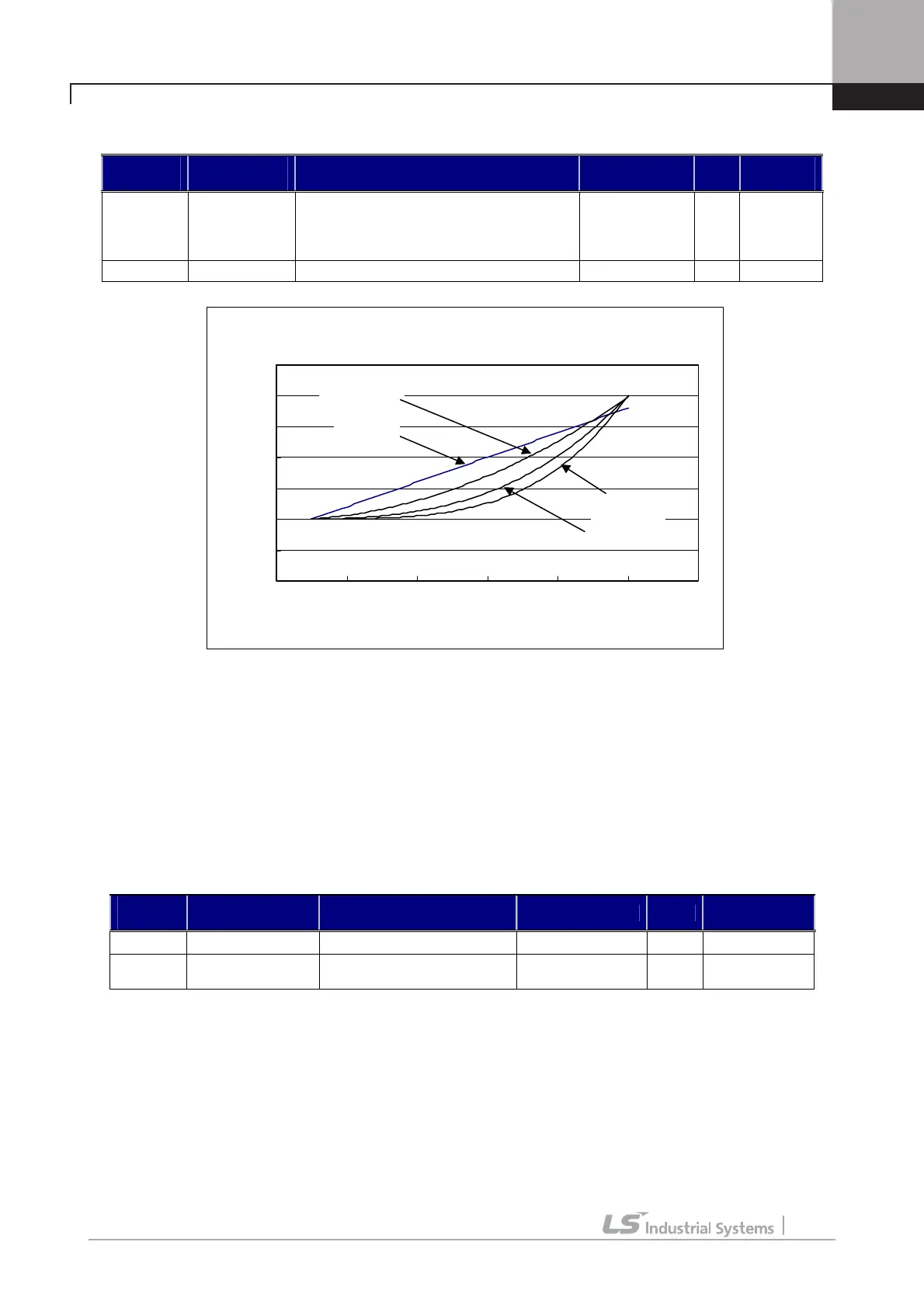
WEB_35 P Profiler Process PID P Gain Profiler Type Setting
Linear
Square
Cubed
Quadratic
Linear
WEB_36 P Apt Gain Process PID P Gain Profiler Gain Setting -1.00 ~ 10.00 0.00
P Gain applicable where P Gain : 100.0[%], Adaptation Gain : 2.00, Core Size : 10.0[%]
10) WEB_37 ProcPID Kd : Process PID D Gain
11) WEB_38 ProcKd LPF : Process PID D Gain LPF Time Constant
WEB_37 ProcPID Kd and WEB_38 ProcKd LPF constitute D controller of Process PID controller. When the error
deviation is 100[%] where WEB_37 ProcPID Kd setting is 100 [%], it means D controller output before going
through LPF is 100 [%]. Without LPF, D controller generates outputs when the error changes only. As this
characteristic makes the system unstable, LPF is a necessary function in D controller.
Function
Code
Loader Display Name of Function Set Range Unit
Factory
Default
WEB_37 ProcPID Kd Process PID D Gain Setting 0.0 ~ 100.0 % 0.0
WEB_38 ProcKd LPF
Process PID D Gain
LPF Time Constant
0.0 ~ 100.0 sec 2.0
12) WEB_39 Proc Pos Lmt : Process PID Positive Limit Setting
13) WEB_40 Proc Neg Lmt : Process PID Negative Limit Setting
WEB_39 Proc Pos Lmt and WEB_40 Proc Neg Lmt are the upper and lower limits of the final output of Process
PID controller. WEB_39 Proc Pos Lmt sets the (+) limit of PID controller output value, while WEB_40 Proc Neg Lmt
sets (-) limit of PID controller output value. This function expresses the PID controller output in % value. For example,
if error is 100[%] and P Gain of PID controller is set as 200[%], the output of PID controller before restricted becomes
P gain adaptation
0
50
100
150
200
250
300
350
0 20 40 60 80 100 120
Diameter
P Gain
Linear
Quadratic
Cubed
S
uared

 Loading...
Loading...


