4. Trial Operation
4-6
4.5 Auto-Tuning
Parameters such as stator resistance (R
s
), stator leakage inductance (sL
), flux current (IF), rotor time
constant (τ
r
) and stator self-inductance (Ls) are indispensable for obtaining an excellent control
performance in the vector control and are automatically measured and set using auto-tuning function.
■ SV-iV5 features two types of Auto-tuning: 1) Rotational Auto Tuning
2) Standstill Auto Tuning
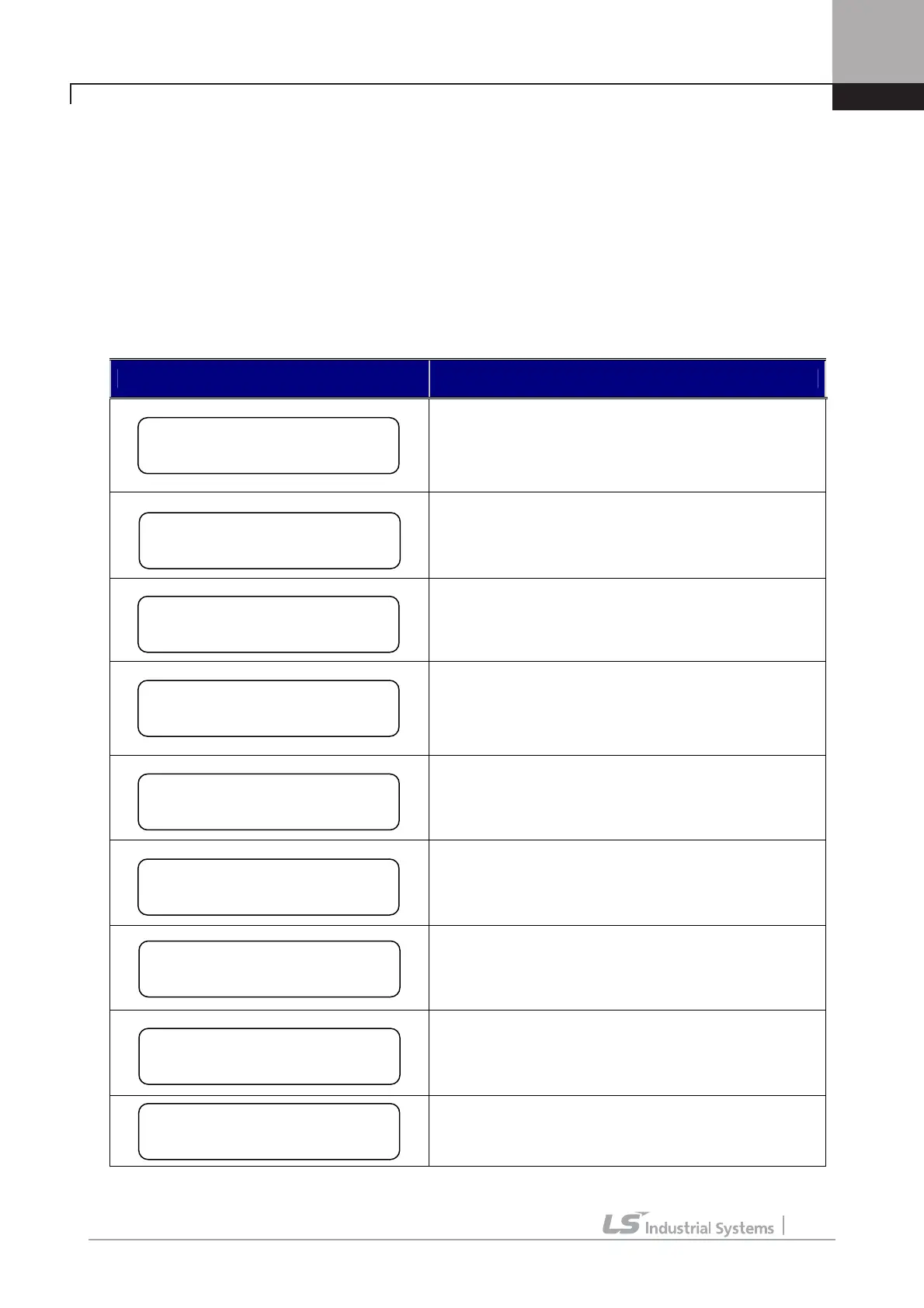
4.5.1 Motor & encoder parameter setting for auto-tuning
The Motor capacity, Basic speed, Rating voltage, Pole number, Efficiency, Rating slip and Rating current on
the nameplate of the motor and the pulse number of encoder should be set before operation.
LCD Display Description
z Enter the motor capacity.
z Basic capacity is same with Inverter capacity
z Enter directly in the PAR_08 after selecting “User
Define” if there is no Motor capacity.
z Enter the motor capacity directly at PAR_08 incase
that select “User Define” at PAR_07
z Set the pulse numbers per revolution of pulse
encoder coupled to the motor shaft.
z Set the motor base speed.
Note) It is not rating current of name plate.
Base Speed = 120 X Base Frequency/ Pole number
z Set the rated voltage of the motor.
(Voltage value on the name plate)
z Set the number of poles of the motor.
z Set the efficiency of the motor. If you cannot find
the efficiency in name plate, Do not set the
Efficiency.
z Set the rated slip speed of the motor.
(Rated slip=synchronous speed–rated speed)
z Set the rated current of the motor.
PAR▶ Motor select
07 kW
PAR▶ Base Speed
17 rpm
PAR▶ Pole number
19 []
PAR▶ Rated Volt
18 V
PAR▶ Rated-Curr
22 A
PAR▶ Rated-Slip
21 rpm
PAR▶ Enc Pulse
10 [][][]
PAR▶ Efficiency
20 %
PAR▶ UserMotorSel
08 kW

 Loading...
Loading...


