10. Usage
MiR100 Hook User Guide (en) 10/2020 - v.3.0 ©Copyright 2016-2020: Mobile Industrial Robots A/S. 154
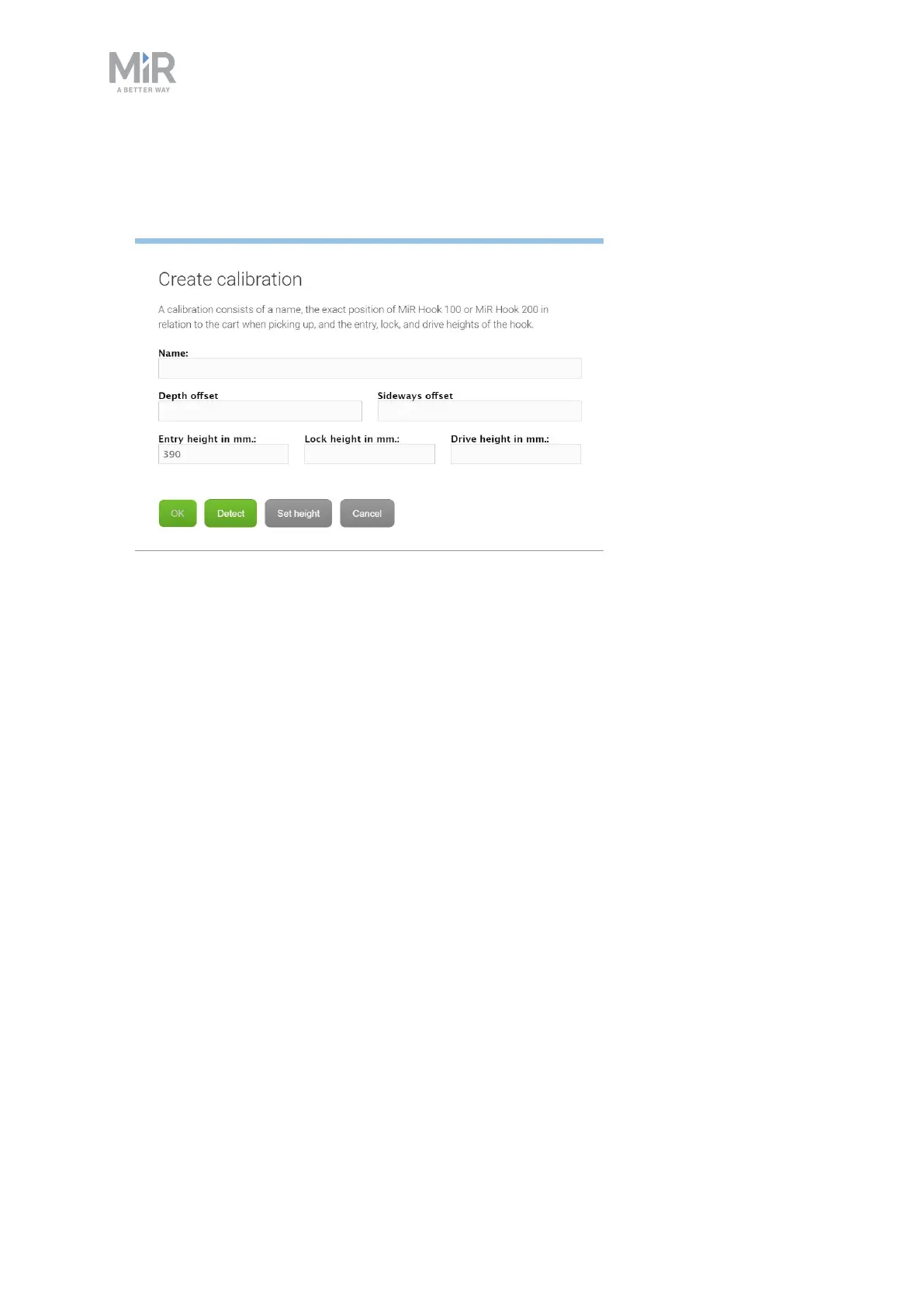
4. Under Calibration, select Create / Edit. Here you can either select an existing cart
calibration, or create a new calibration by selecting Create calibration. When creating a
new calibration you must defined the following parameters:
• Name: Is used to identify the calibration settings. This will automatically be filled when
you select Detect and MiR100 Hook is correctly positioned to read the ID tag of the
cart.
• Entry height: Defines the height of the hook when the robot can move the gripper
beneath the gripper bar. This is the height the robot should currently be set to. Select
Detect, and if MiR100 Hook is correctly positioned to read the ID tag of the cart, the
Entry height will be entered.
• Side and Depth Offset: These are used to define the exact position of MiR100 Hook
relative to the cart. If MiR100 Hook is positioned at the Entry height determined in
Calibrate cart on page99 and the camera is in front of the ID tag, you can select
Detect to automatically fill in these parameters.
• Lock height: Defines the height of the hook when the gripper is securely attached to
the gripper bar. This is the value determined in Calibrate cart on page99 step 3.
• Drive height: Defines the height of the hook that should be used while the robot is
towing the cart. This is often the same as the Lock height.
5. Select Save changes when you are done. The cart is now displayed in the list of carts.