16 Teaching and Setting of Adjustment Variables (
“
1
”
Program)
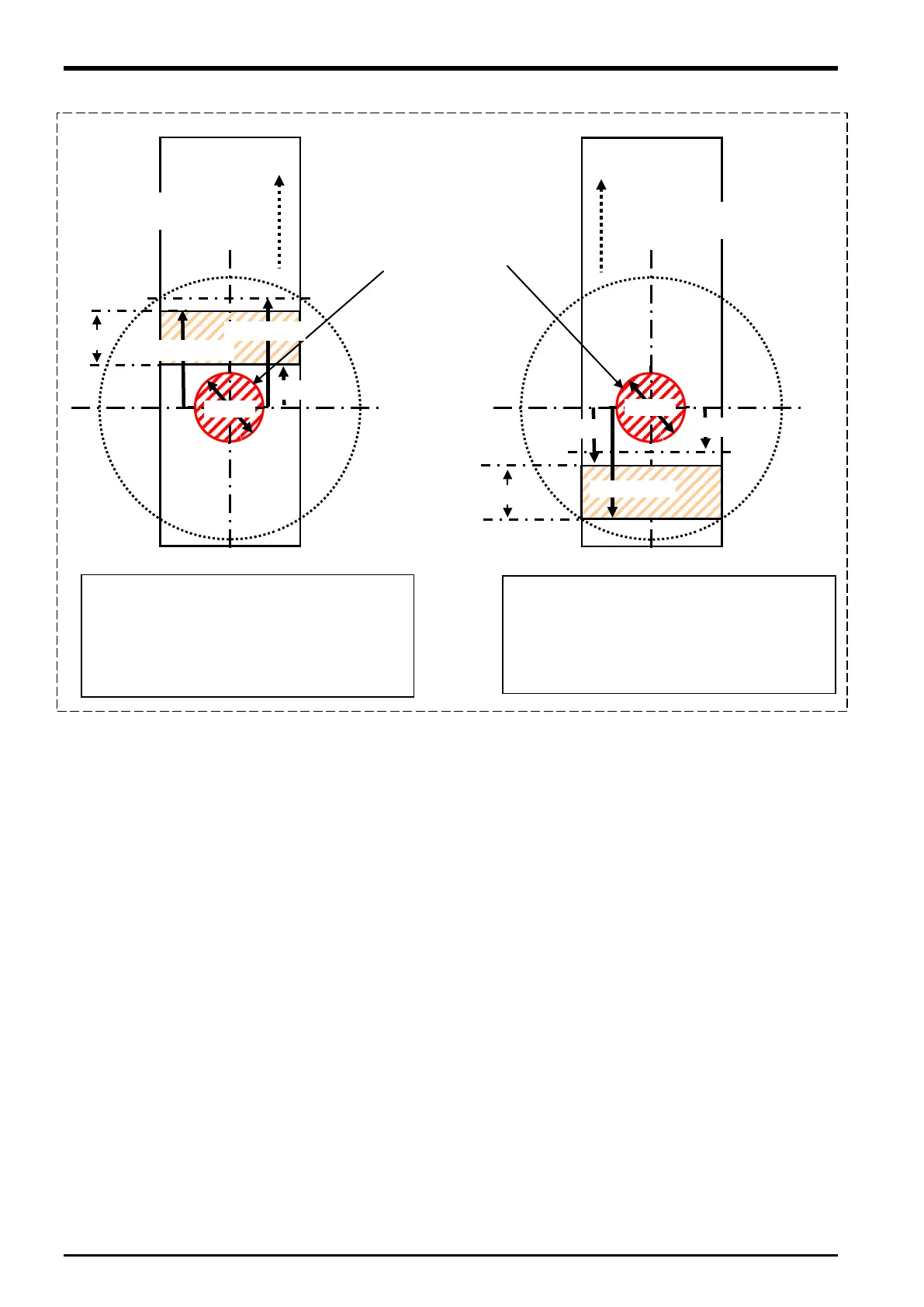
Figure 16
−2 Relationship of singular point neighborhood and tracking area
When the conveyer is placed at the right under
the robot
and the workpiece move
to front (= the X coordinate of PTN is “5”)
and the operation range of tracking is set at
front of the robot.
は、(X,Y,Z)=(-65,+200,+230)
Workpiece
movement direction
<Singular Adjustment Point>
The robot can not pass over the
singular adjustment point while
the tracking operation.
When the conveyer is placed at the right under
the robot
and the workpiece move
to front (= the X coordinate of PTN is “5”)
and the operation range of tracking is set at
backward the robot.
は、(X,Y,Z)=(+230,-95,-75)
Workpiece
movement direction
16-82 Setting of adjustment variables in the program

 Loading...
Loading...



