16 Teaching and Setting of Adjustment Variables (
“
1
”
Program)
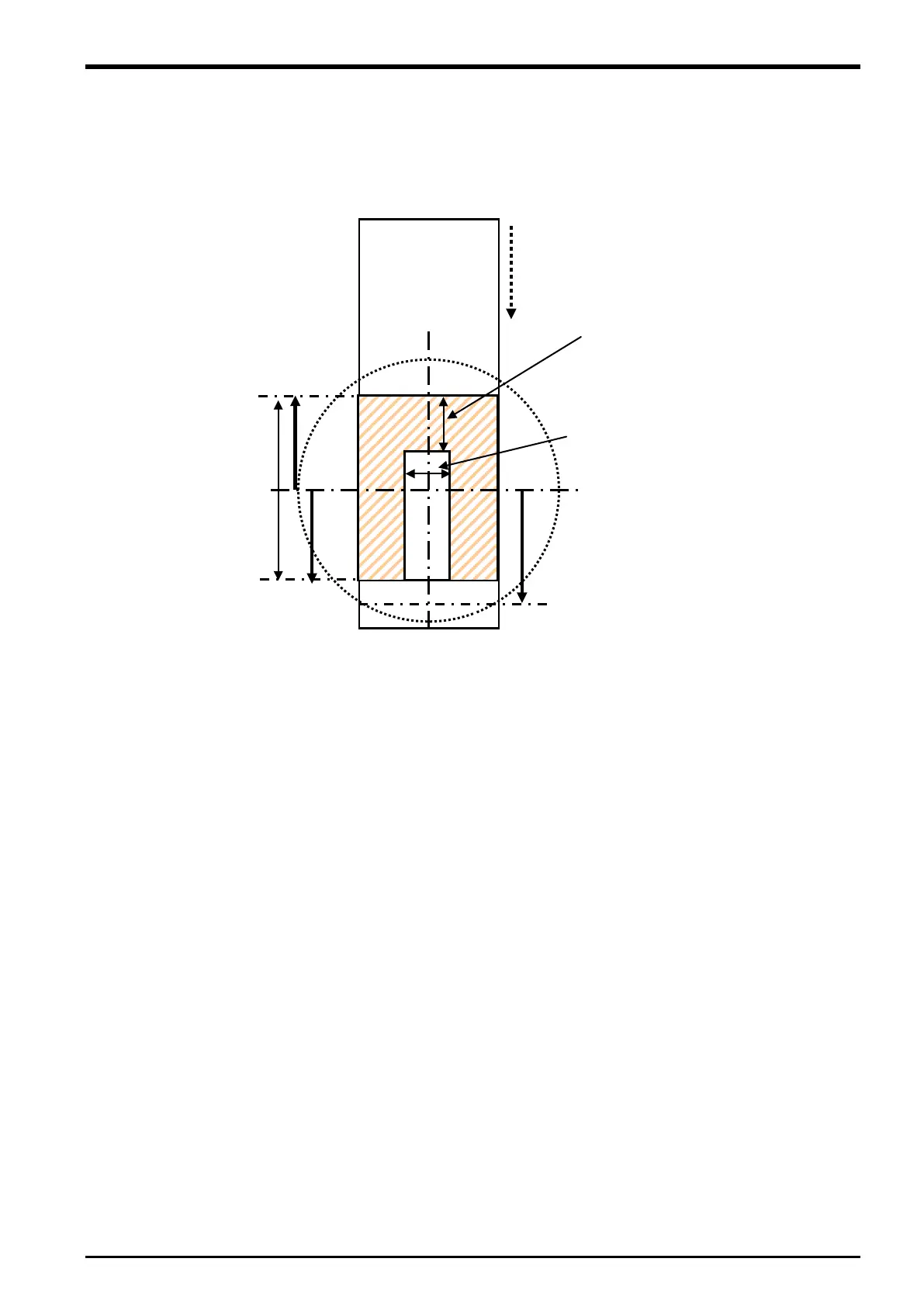
<Restrictions of RH-3S*HR when using the tracking function>
The RH-3S*HR can not pass over the singular adjustment point while the tracking operation.
It is necessary to avoid singular adjustment point and place the conveyer.
As shown in Figure 16−1 or Figure 16−2, If the conveyer is installed at right under the robot, the operation range
of tracking must been setting out of range of singular adjustment point.
Figure 16
−1 Diagram of Relationship between Adjustment Variables “PRNG” and “P3HR” in the Program
Workpiece
movement direction
X=300mm
Distance that the robot can follow a
workpiece
calculated by X value, Y
value, speed of conveyer, and PUP1
value
.
Setting of adjustment variables in the program 16-81

 Loading...
Loading...



