Examples and tips
PROGRAMMING MANUAL 250
Revision 3.0
Therefore, the parameters are:
With these settings, executing MOVE(50) moves the moving part
50 mm, or one station.
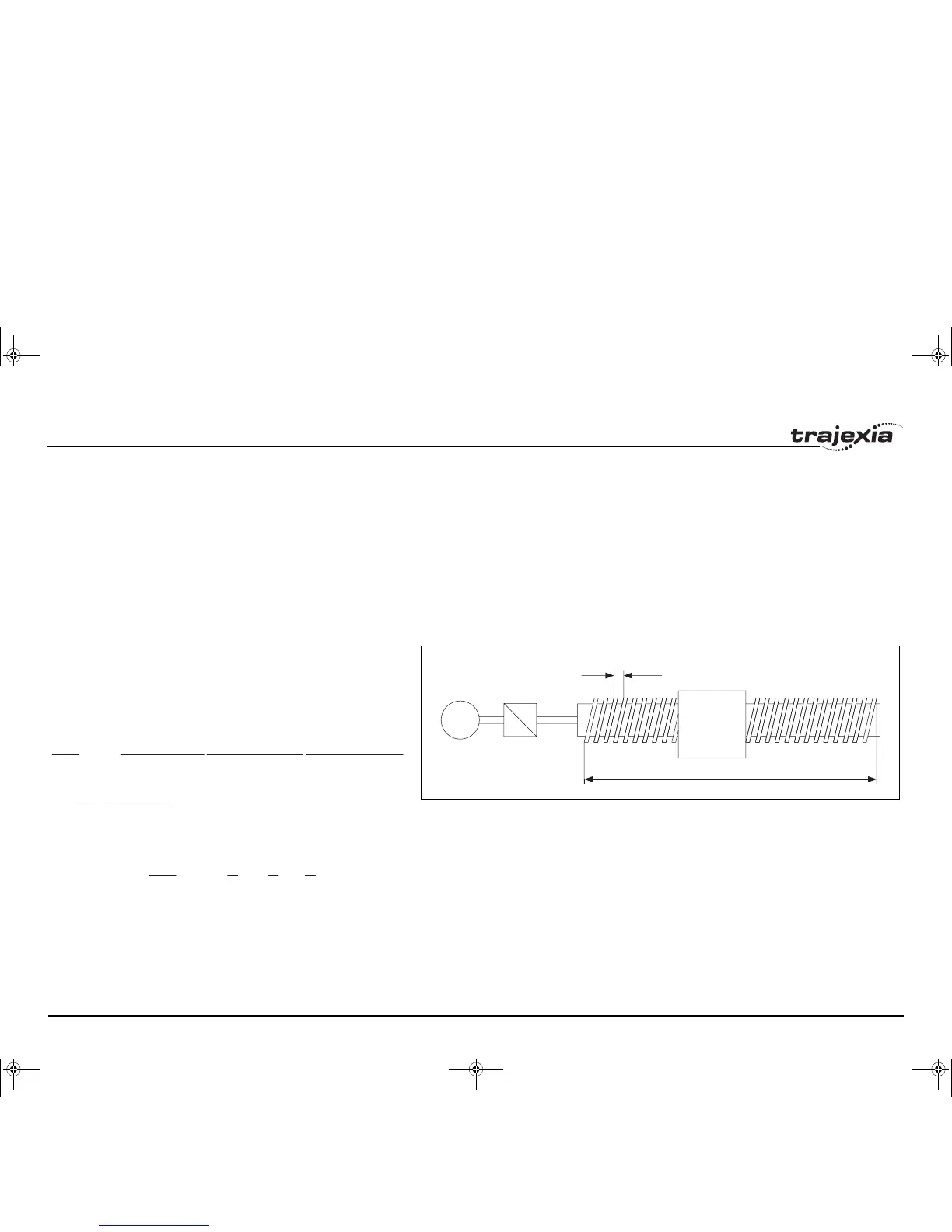
Example 6
fig. 24
The mechanical system consists of a ball screw. It uses a servo
motor with a 17-bit absolute encoder. The mechanical gear ratio of
the gearbox is 1:3. The screw pitch of the ball screw is 10mm per
revolution. The total travel distance of the ball screw is 540 mm.
The mechanical measurement units must be mm.
With the same procedure as in example 1, we have:
Therefore:
One solution is:
UNITS = 2 = 32768
15
Pn202 = 1
Pn203 = 15
Pn205 = 4
REP_DIST = 50
REP_OPTION = 1
17-bit absolute
encoder
M
1:3 Gear
10mm
540mm
Pn202
Pn203
UNITS =
2
17
encoder_counts
1 motor_revolution
1 ballscrew_revolution
3 motor_revolution
10mm
1 ballscrew_revolution
10
2
17
3 encoder_counts
=
mm
=
.
.
..
.
.
Pn202
Pn203
UNITS
17
= 2
10
3
17
= 2
2 5
3
16
= 2
5
3
.
UNITS = 2 = 65536
16
Pn202 = 3
Pn203 = 5
I52E-EN-03.book Seite 250 Freitag, 29. Juni 2007 11:55 11