BASIC commands
PROGRAMMING MANUAL 34
Revision 3.0
3.1.2 Axis parameters
/i
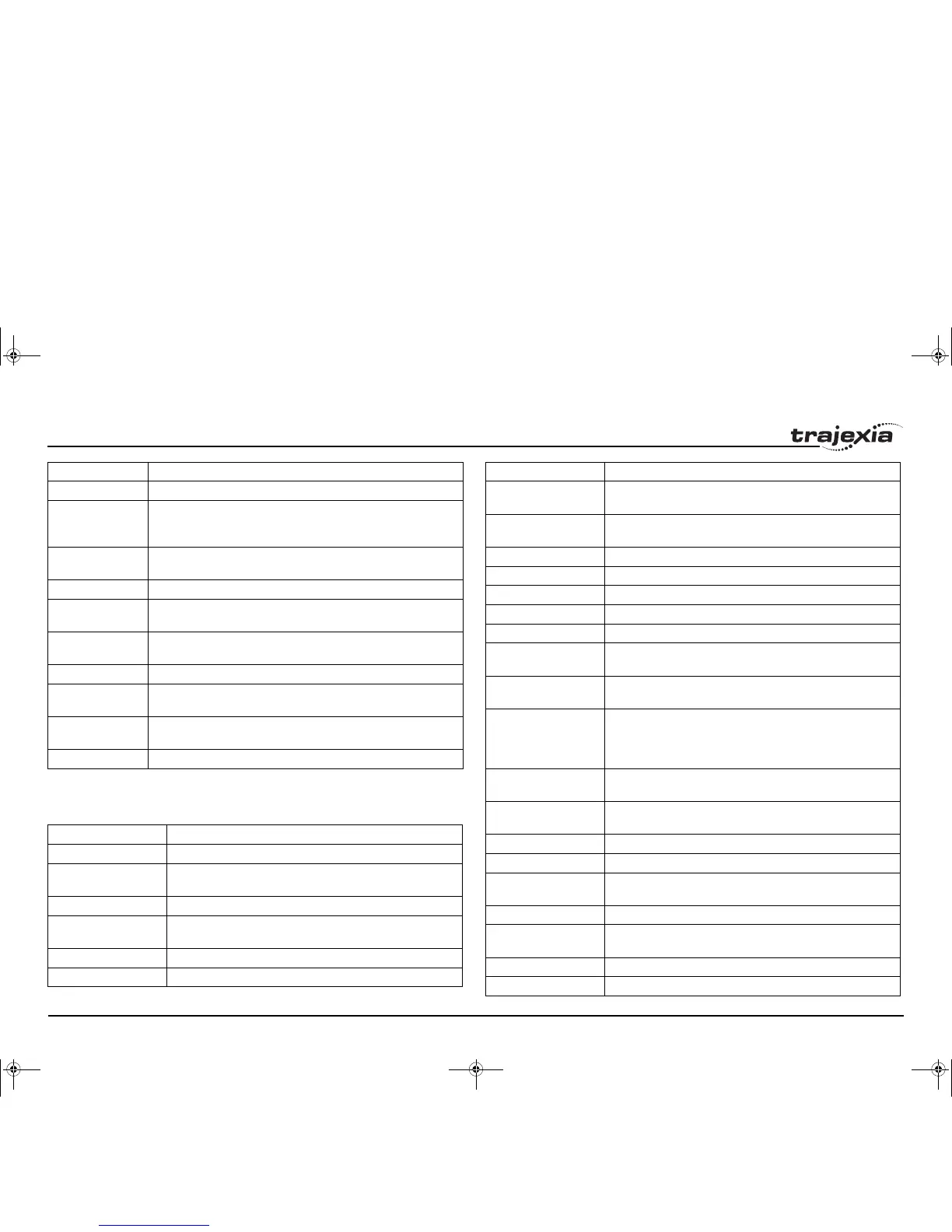
MHELICAL Interpolates 3 orthogonal axes in a helical move.
MOVE Moves one or more axes at the demand speed, acceleration and
deceleration to the position specified as increment from the current
position.
MOVEABS Moves one or more axes at the demand speed, acceleration and
deceleration to the position specified as absolute position.
MOVECIRC Interpolates 2 orthogonal axes in a circular arc.
MOVELINK Creates a linear move on the base axis linked via a software gear-
box to the measured position of a link axis.
MOVEMODIFY Changes the absolute end position of the current single-axis linear
move (MOVE or MOVEABS).
RAPIDSTOP Cancels the current move on all axes.
REGIST Captures an axis position when a registration input or the Z mark on
the encoder is detected.
REVERSE Moves an axis continuously in reverse at the speed set in the
SPEED parameter.
STEP_RATIO Sets the ratio for the axis stepper output.
Name Description
ACCEL Contains the axis acceleration rate.
ADDAX_AXIS Contains the number of the axis to which the base axis is cur-
rently linked to by ADDAX.
ATYPE Contains the axis type.
AXIS_DISPLAY Selects information that are represented by the LEDs on the
front cover of the TJ1-FL02.
AXIS_ENABLE Enables and disables particular axis independently of other axis.
AXISSTATUS Contains the axis status.
Name Description
CLOSE_WIN Defines the end of the window in which a registration mark is
expected.
CLUTCH_RATE Defines the change in connection ratio when using the
CONNECT command.
CREEP Contains the creep speed.
D_GAIN Contains the derivative control gain.
DAC_SCALE Sets scale and polarity applied to DAC values.
DATUM_IN Contains the input number to be used as the origin input.
DECEL Contains the axis deceleration rate.
DEMAND_EDGES Contains the current value of the DPOS axis parameter in
encoder edges.
DPOS Contains the demand position generated by the move com-
mands.
DRIVE_CONTROL Selects data to be monitored using DRIVE_MONITOR for axes
connected via the MECHATROLINK-II bus. For axes connected
via the TJ1-FL02, DRIVE_CONTROL sets outputs of the TJ1-
FL02.
DRIVE_INPUTS Holds I/O data of the driver connected to MECHATROLINK-II
bus. Data is updated every servo cycle.
DRIVE_MONITOR Monitors data of the Servo Driverr connected to MECHATRO-
LINK-II bus. Data are updated every servo cycle.
DRIVE_STATUS Contains the current status of the Servo Driver.
ENCODER Contains a raw copy of the encoder hardware register.
ENCODER_BITS Sets the number of bits for the absolute encoder connected to
TJ1-FL02.
ENCODER_CONTROL Controls operating mode of the EnDat absolute encoder.
ENCODER_ID Returns the ID value of the absolute encoder connected to TJ1-
FL02.
ENCODER_RATIO Sets scaling value for incoming encoder counts.
ENCODER_STATUS Returns the status of the Tamagawa absolute encoder.
Name Description
I52E-EN-03.book Seite 34 Freitag, 29. Juni 2007 11:55 11