Examples and tips
PROGRAMMING MANUAL 287
Revision 3.0
• The Following Error is proportional to the speed if you use only
Proportional Gain in the position loop.
• The torque, which is given by DRIVE_MONITOR as a
percentage of the nominal torque of the motor when you set
DRIVE_CONTROL=11) is proportional to the acceleration
according to the formula:
Torque
total
= J
total
×
α
+ Torque
friction
where Torque
friction
is usually small, α is the angular
acceleration, and J the inertia of the system.
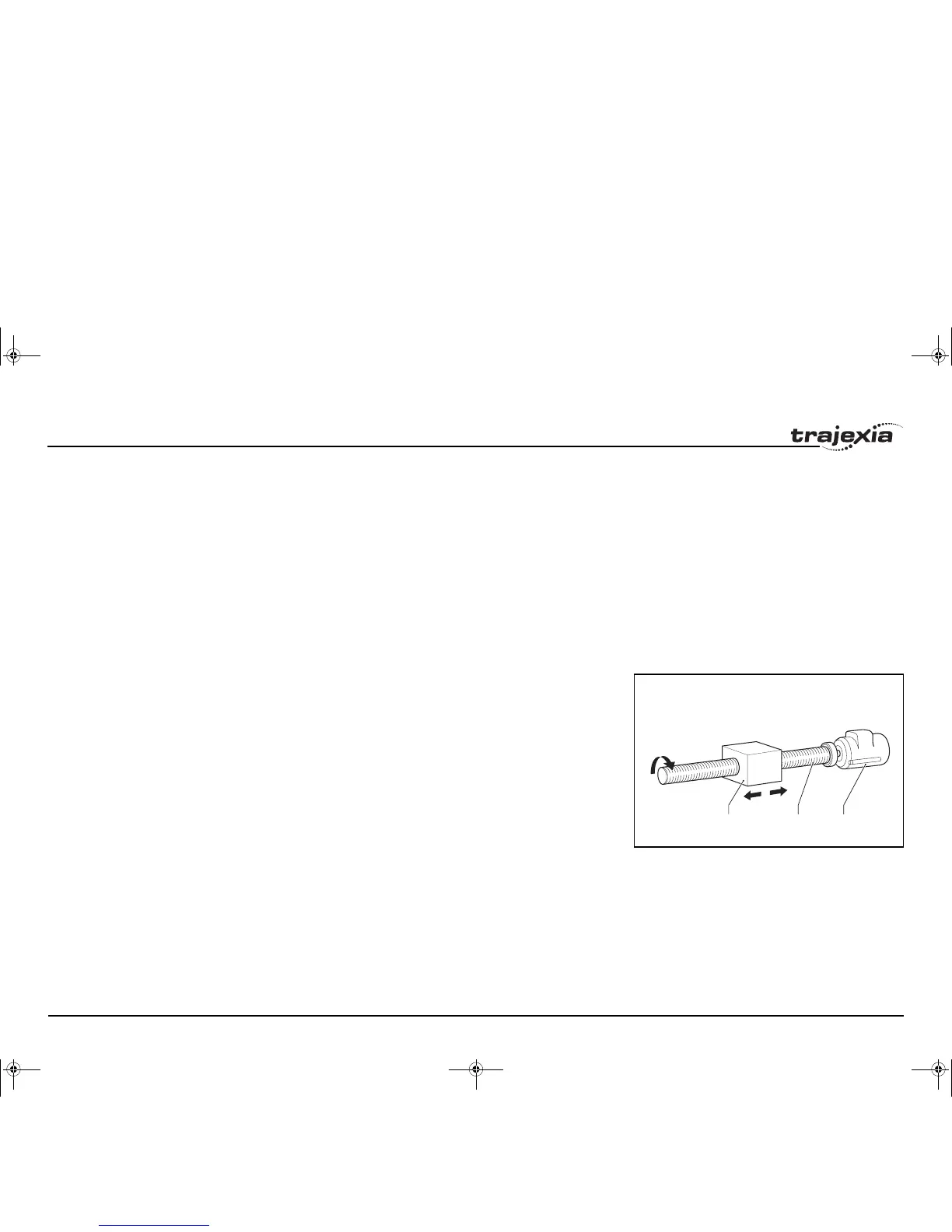
6.2.4 Position with product detection
fig. 51
A ballscrew moves forward at a creep speed until it reaches a
product, a microswitch (IN(2)) turns on.
The ballscrew is stopped immediately, the position at which the
product is sensed is indicated and the ballscrew returns at a rapid
speed back to the start position.
A
B
C
I52E-EN-03.book Seite 287 Freitag, 29. Juni 2007 11:55 11