BASIC commands
PROGRAMMING MANUAL 69
Revision 3.0
3.2.82 DRIVE_CLEAR
/i
3.2.83 DRIVE_CONTROL
/i
/i
Type Axis command
Syntax DRIVE_CLEAR
Description The DRIVE_CLEAR command clears the alarm status of the Servo Driver
connected via the MECHATROLINK-II bus. This command is not capable of
clearing all the possible alarm states. Some alarms can only be cancelled by
turning off the power supply (both the TJ1-MC__ and the Servo Driver), and
then turning it on again.
Arguments N/A
Example No example.
See also DRIVE_STATUS.
Caution
Be sure that no Parameter Unit or Personal Computer Software is
connected to the Servo Driver when executing this command.
Otherwise the program task will be paused until the connection of
the other device to the Servo Driver is removed.
Type Axis parameter
Syntax DRIVE_CONTROL
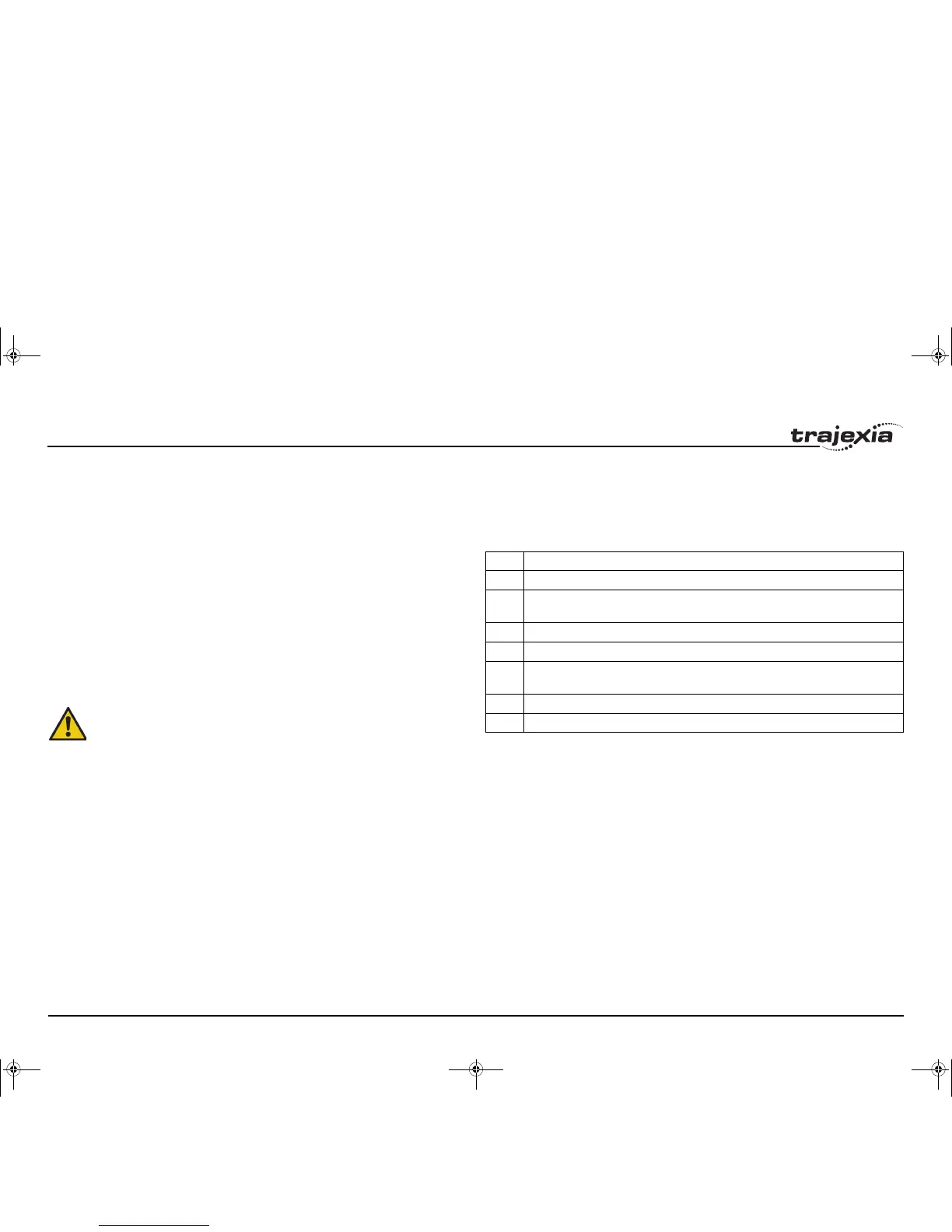
Description When applied to axis controlled by the Servo Driver connected to the system
via the MECHATROLINK-II bus, this parameter selects the data to be moni-
tored by DRIVE_MONITOR according to the table below. If a Servo Driver for
the axis is connected using the TJ1-FL02, this parameter sets outputs of the
TJ1-FL02. Set bit 8 of this parameter to switch on OUT 0 for an axis. Set bit 9
of this parameter to switch on OUT 1 for an axis. Keep in mind that the same
outputs are used by the HW_PSWITCH command.
Arguments N/A
Example DRIVE_CONTROL AXIS(2) = 256
In this example, OUT 0 is switched on for axis 2, connected using the TJ1-
FL02.
See also N/A
Code Description
2 Following error (this is the real FE when ATYPE=40 is used)
8 Feedback speed (With Atype=41 Units=Max Speed/40000000H, with other Atype
Units= reference units/s)
9 Command speed (units same as in Feedback Speed)
10 Target speed (units same as in Feedback Speed)
11 Torque (Force) reference (With Atype=42 Units=Max Torque/40000000H, with
other Atype Units= % over nominal Torque
14 Monitor selected with Pn813.0 Useful to monitor servo monitors (Unxxx)
15 Monitor selected with Pn813.1 Useful to monitor servo monitors (Unxxx)
I52E-EN-03.book Seite 69 Freitag, 29. Juni 2007 11:55 11