BASIC commands
PROGRAMMING MANUAL 36
Revision 3.0
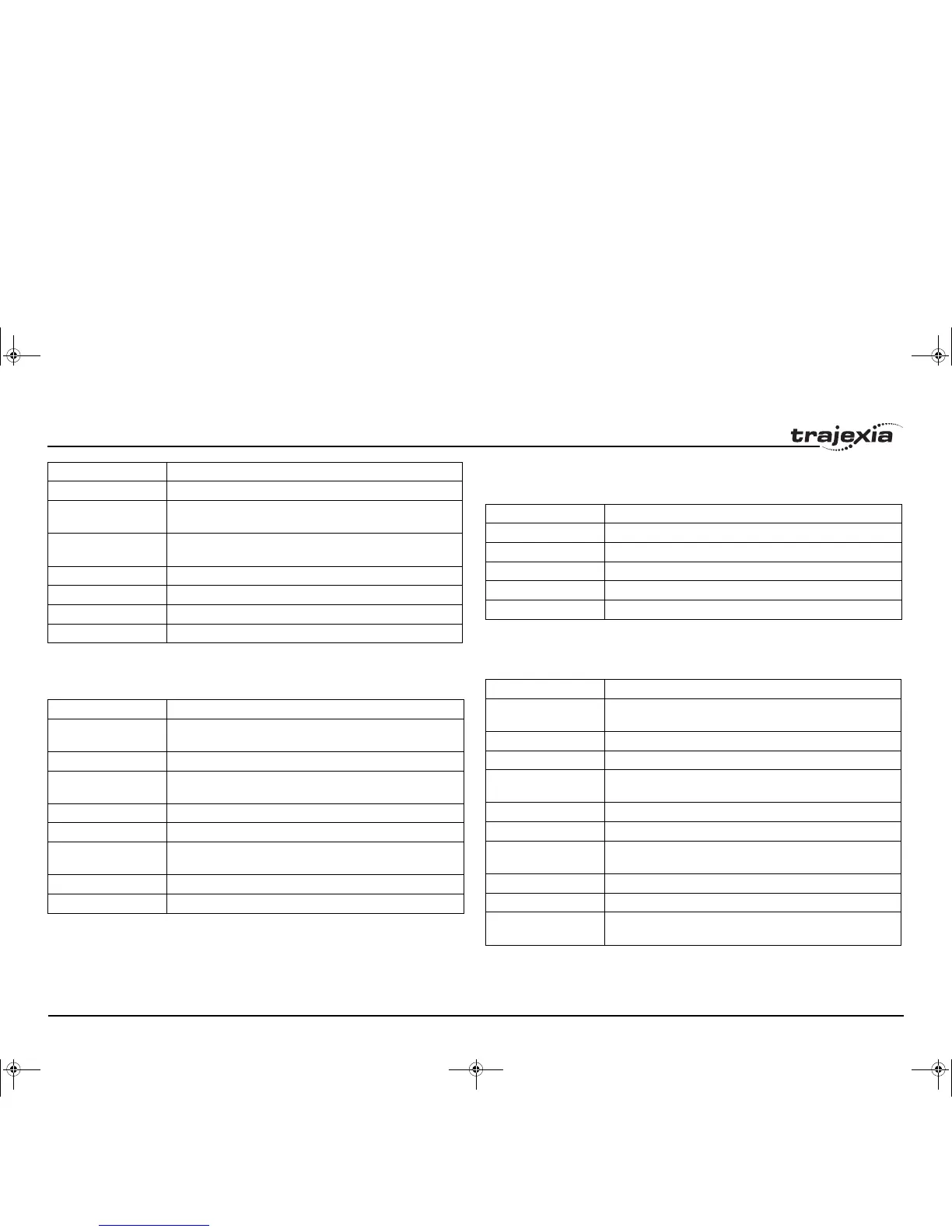
3.1.3 Communication commands and parameters
/i
3.1.4 Constants
/i
3.1.5 I/O commands, functions and parameters
/i
SRAMP Contains the S-curve factor.
T_REF Contains the torque reference value which is applied to the
servo motor.
TRANS_DPOS Contains axis demand position at output of frame transforma-
tion.
UNITS Contains the unit conversion factor.
VERIFY Selects different modes of operation on a stepper output axis.
VFF_GAIN Contains the speed feed forward control gain.
VP_SPEED Contains the speed profile speed.
Name Description
FINS_COMMS Sends FINS Read Memory and Write Memory to a designated
FINS server unit.
HLM_COMMAND Executes a specific Host Link command to the Slave.
HLM_READ Reads data from the Host Link Slave to either VR or TABLE var-
iable array.
HLM_STATUS Represents the status of the last Host Link Master command.
HLM_TIMEOUT Defines the Host Link Master timeout time.
HLM_WRITE Writes data to the Host Link Slave from either VR or TABLE var-
iable array.
HLS_NODE Defines the Slave unit number for the Host Link Slave protocol.
SETCOM Sets the serial communications.
Name Description
Name Description
FALSE Equal to the numerical value 0.
OFF Equal to the numerical value 0.
ON Equal to the numerical value 1.
PI Equal to the numerical value 3.1416.
TRUE Equal to the numerical value -1.
Name Description
GET Waits for the arrival of a single character and assigns the ASCII
code of the character to variable.
IN Returns the value of digital inputs.
INDEVICE Parameter defines the default input device.
INPUT Waits for a string to be received and assigns the numerical value
to variable.
KEY Returns TRUE or FALSE depending on if character is received.
LINPUT Waits for a string and puts it in VR variables.
OP Sets one or more outputs or returns the state of the first 24 out-
puts.
OUTDEVICE Defines the default output device.
PRINT Outputs a series of characters to a serial port.
PSWITCH Turns on an output when a predefined position is reached, and
turns off the output when a second position is reached.
I52E-EN-03.book Seite 36 Freitag, 29. Juni 2007 11:55 11