BASIC commands
PROGRAMMING MANUAL 33
Revision 3.0
3 BASIC commands
3.1 Categories
This section lists all BASIC commands divided by categories. The categories
are:
• Axis commands.
• Axis parameters.
• Communication commands and parameters.
• Constants.
• I/O commands, functions and parameters.
• Mathematical functions and operations.
• Program commands.
• Program control commands.
• Slot parameters and modifiers.
• System commands and functions.
• System parameters.
• Task commands and parameters.
The lists are quick reference guides only. A complete description of the
commands is given in alphabetical order in the next section.
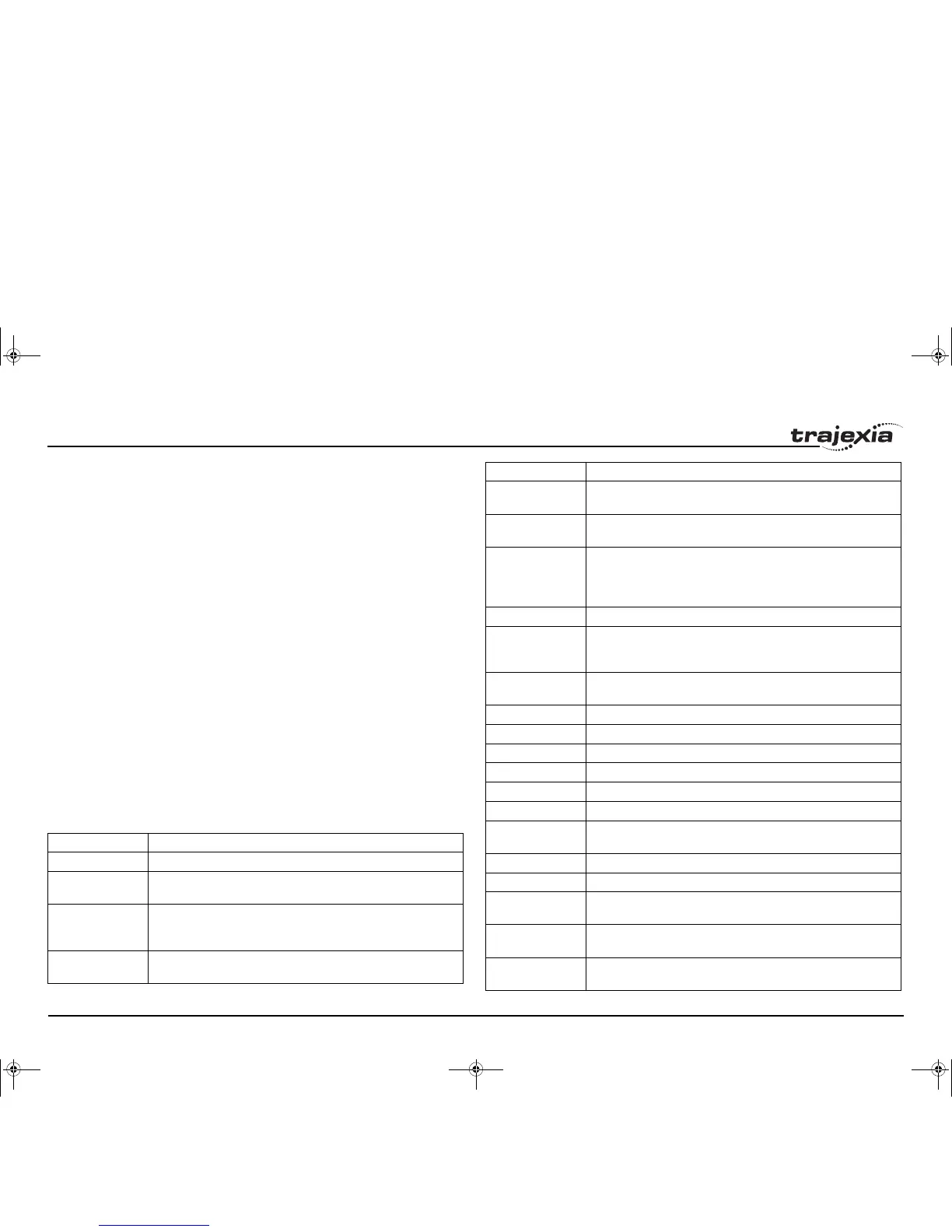
3.1.1 Axis commands
/i
Name Description
ACC Changes the ACCEL and DECEL at the same time.
ADD_DAC Sum to the DAC value of one axis to the analogue output of the
base axis.
ADDAX Sets a link to a superimposed axis. All demand position movements
for the superimposed axis will be added to any moves that are cur-
rently being executed.
B_SPLINE Expands the profile stored in TABLE memory using the B-Spline
mathematical function.
BASE Used to set the base axis to which the commands and parameters
are applied.
CAM Moves an axis according to values of a movement profile stored in
the TABLE variable array.
CAMBOX Moves an axis according to values of a movement profile stored in
the TABLE variable array. The motion is linked to the measured
motion of another axis to form a continuously variable software gear-
box.
CANCEL Cancels the move on an axis.
CONNECT Connects the demand position of an axis to the measured move-
ments of the axis specified for driving_axis to produce an electronic
gearbox.
DATUM Performs one of 7 origin search sequences to position an axis to an
absolute position or reset a motion error.
DEFPOS Defines the current position as a new absolute position.
DISABLE_GROUP Groups axes together for error disabling.
DRIVE_ALARM Monitors the current alarm.
DRIVE_CLEAR Clears the alarm status of the Servo Driver.
DRIVE_READ Reads the specified parameter of the Servo Driver.
DRIVE_RESET Resets the Servo Driver.
DRIVE_WRITE Writes a specific value to the specified parameter of the Servo
Driver.
ENCODER_READ Reads a parameter of the EnDat absolute encoder.
ENCODER_WRITE Writes to a parameter of the EnDat absolute encoder.
FORWARD Moves an axis continuously forward at the speed set in the SPEED
parameter.
HW_PSWITCH Sets on and off the hardware switch on output 0 of the TJ1-FL02
when predefined positions are reached.
MECHATROLINK Initializes MECHATROLINK-II bus and performs various operations
on MECHATROLINK-II stations connected to the bus.
Name Description
I52E-EN-03.book Seite 33 Freitag, 29. Juni 2007 11:55 11