BASIC commands
PROGRAMMING MANUAL 35
Revision 3.0
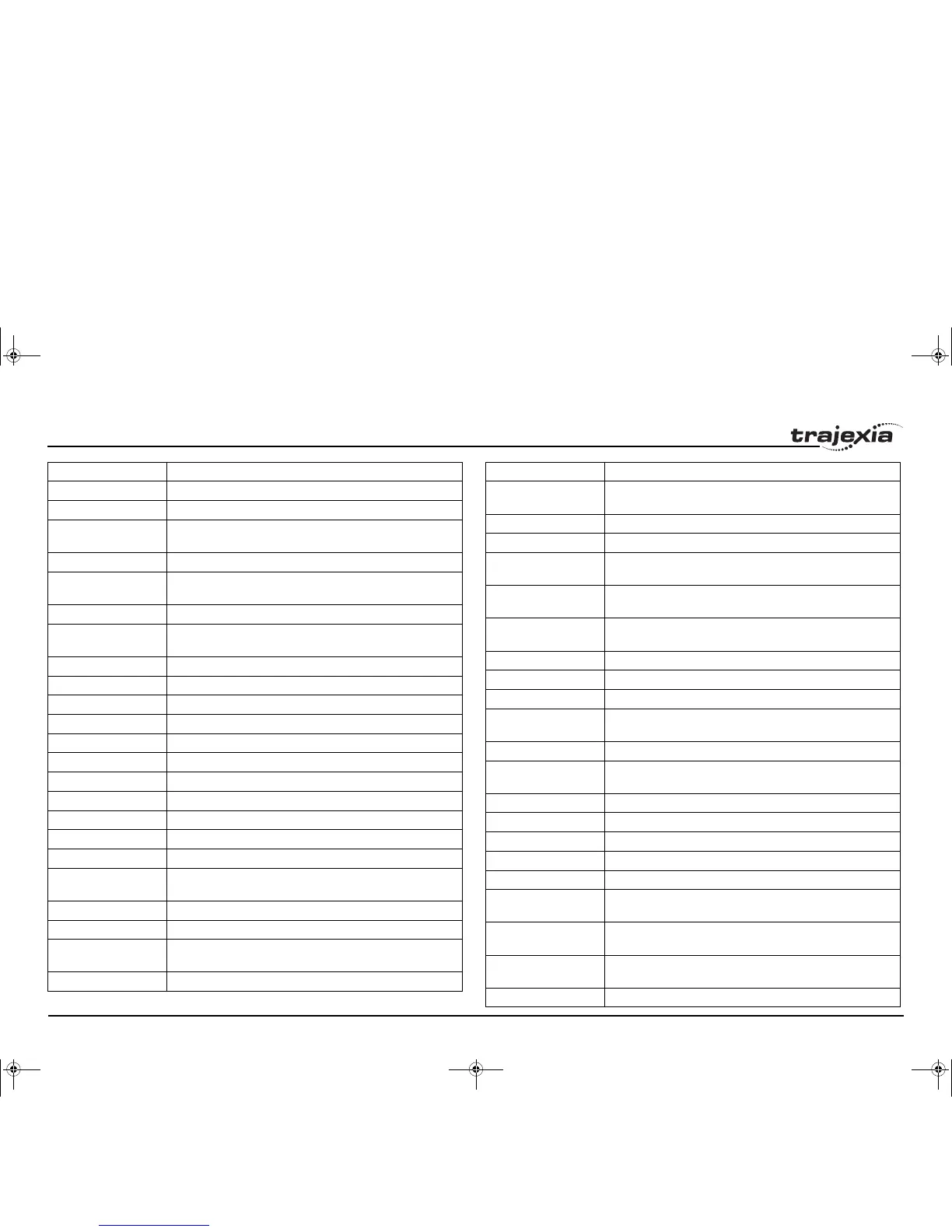
ENCODER_TURNS Returns the multi-turn count of the absolute encoder.
ENDMOVE Holds the position of the end of the current move.
ERRORMASK Contains the mask value that determines if MOTION_ERROR
occurs depending on the axis status.
FAST_JOG Contains the input number to be used as the fast jog input.
FASTDEC Defines ramp to zero deceleration ratio when an axis limit switch
or position is reached.
FE Contains the Following Error.
FE_LATCH Contains the FE value which caused the axis to put controller in
MOTION_ERROR state.
FE_LIMIT Contains the maximum allowable Following Error.
FE_LIMIT_MODE Defines how FE influences MOTION_ERROR state.
FE_RANGE Contains the Following Error warning range limit.
FHOLD_IN Contains the input number to be used as the feedhold input.
FHSPEED Contains the feedhold speed.
FS_LIMIT Contains the absolute position of the forward software limit.
FWD_IN Contains the input number to be used as a forward limit input.
FWD_JOG Contains the input number to be used as a jog forward input.
I_GAIN Contains the integral control gain.
INVERT_STEP Switches a hardware inverter into the stepper output circuit.
JOGSPEED Sets the jog speed.
LINKAX Contains the axis number of the link axis during any linked
move.
MARK Detects the primary registration event on a registration input.
MARKB Detects the secondary registration event on a registration input.
MERGE Is a software switch that can be used to enable or disable the
merging of consecutive moves.
MPOS Is the position of the axis as measured by the encoder.
Name Description
MSPEED Represents the change in the measured position in the last
servo period.
MTYPE Contains the type of move currently being executed.
NTYPE Contains the type of the move in the Next Move buffer.
OFFPOS Contains an offset that will be applied to the demand position
without affecting the move in any other way.
OPEN_WIN Defines the beginning of the window in which a registration
mark is expected.
OUTLIMIT Contains the limit that restricts the speed reference output from
the TJ1-MC__.
OV_GAIN Contains the output velocity control gain.
P_GAIN Contains the proportional control gain.
REG_POS Contains the position at which a registration event occurred.
REG_POSB Contains the position at which the secondary registration event
occurred.
REMAIN Is the distance remaining to the end of the current move.
REMOTE_ERROR Returns number of errors on MECHATROLINK-II connection of
the Servo Driver.
REP_DIST Contains or sets the repeat distance.
REP_OPTION Controls the application of the REP_DIST axis parameter.
REV_IN Contains the input number to be used as a reverse limit input.
REV_JOG Contains the input number to be used as a jog reverse input.
RS_LIMIT Contains the absolute position of the reverse software limit.
S_REF Contains the speed reference value which is applied when the
axis is in open loop.
S_REF_OUT Contains the speed reference value being applied to the Servo
Driver for both open as closed loop.
SERVO Determines whether the axis runs under servo control or open
loop.
SPEED Contains the demand speed in units/s.
Name Description
I52E-EN-03.book Seite 35 Freitag, 29. Juni 2007 11:55 11