BASIC commands
PROGRAMMING MANUAL 54
Revision 3.0
/i
Arguments • start_point
The address of the first element in the TABLE array to be used.
Being able to specify the start point allows the TABLE array to hold more
than one profile and/or other information.
• end_point
The address of the end element in the TABLE array.
• table_multiplier
The Table multiplier value used to scale the values stored in the TABLE.
As the Table values are specified in encoder edges, use this argument to
set the values for instance to the unit conversion factor (set by UNITS
parameter).
• distance
A factor given in user units that controls the speed of movement through
the Table. The time taken to execute CAM depends on the current axis
speed and this distance. For example, assume the system is being pro-
grammed in mm and the speed is set to 10 mm/s and the acceleration
sufficiently high. If a distance of 100 mm is specified, CAM will take 10
seconds to execute.
The SPEED parameter in the base axis allows modification of the speed
of movement when using the CAM move.
Note: When the CAM command is executing, the ENDMOVE parameter is
set to the end of the previous move.
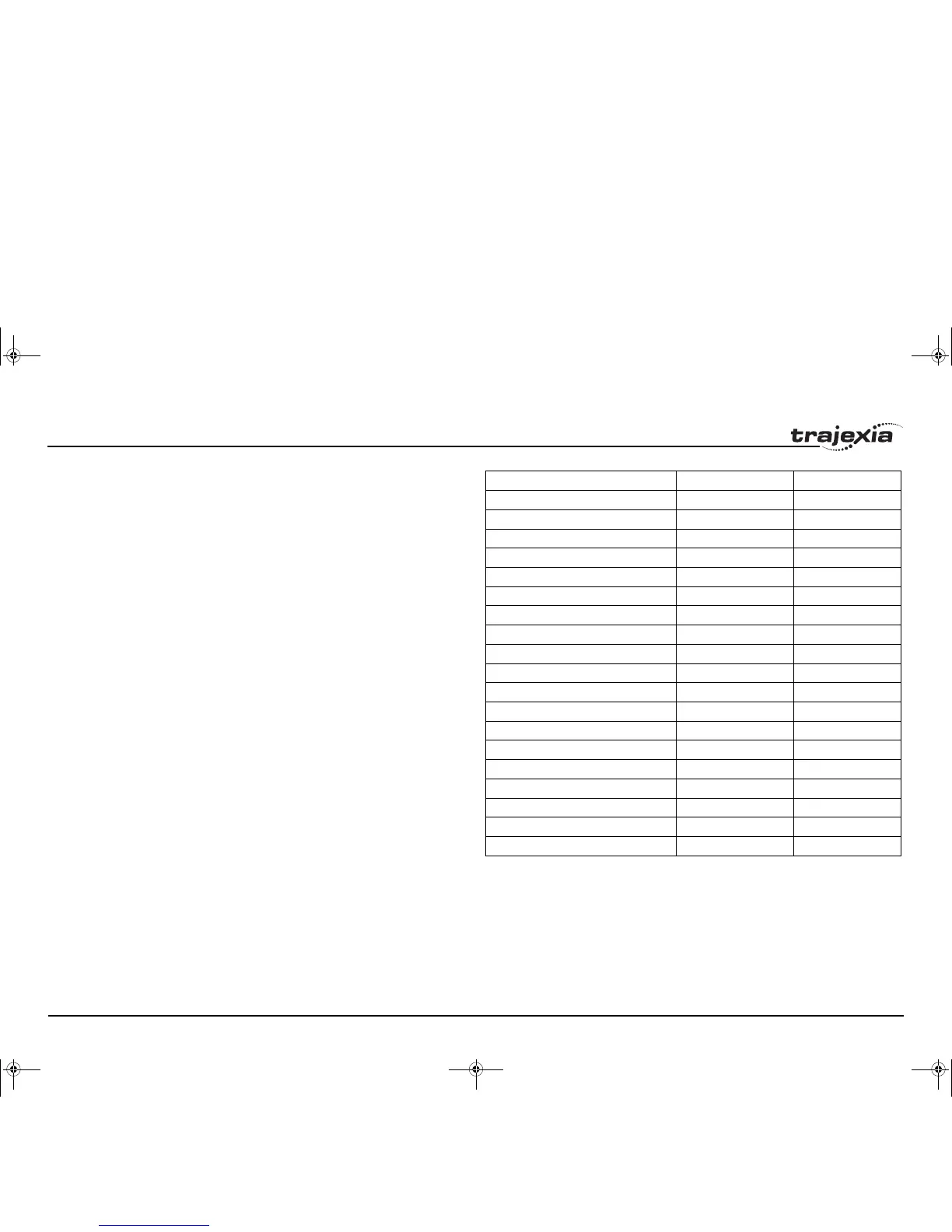
Example Assume that a motion is required to follow the position equation t(x) = x*25 +
10000(1-cos(x)). Here, x is in degrees. This example is for a TABLE that pro-
vides a simple oscillation superimposed with a constant speed. To load the
TABLE and cycle it continuously the following code would be used.
GOSUB camtable
loop:
CAM(1,19,1,200)
GOTO loop
The subroutine camtable would load the data in the table below into the
TABLE array.
See also ACCEL, AXIS, CAMBOX, SPEED, TABLE.
TABLE position Degree Value
100
2 20 1103
3 40 3340
4 60 6500
5 80 10263
6 100 14236
7 120 18000
814021160
9 160 23396
10 180 24500
11 200 24396
12 220 23160
13 240 21000
14 260 18236
15 280 15263
16 300 12500
17 320 10340
18 340 9103
19 360 9000
I52E-EN-03.book Seite 54 Freitag, 29. Juni 2007 11:55 11