Supplementary data
Operating Manual PNOZ s30
1001715-EN-19
| 117
13.3.5.2 Requirements of the drive controller
} Parameters for the control loops and motor control must be set in such a way as to guar-
antee stable operation.
Drag error detection (see below) must be capable of operating in accordance with the re-
quirements of the safety function.
} The motor must be operated with a current impressing control procedure, based on the
rotor position (field-oriented control). If the analogue track signals are idle, field-oriented
control will brake and/or stop the rotor.
} The drive controller must be in position control operating mode.
} If a maximum error variable is exceeded (set/true comparison) the drive controller must
switch to a fault condition and stop the drive (drag error detection). The error reaction to
drag error detection should be a controlled motor stop.
} Fault detection via the error variable with subsequent shutdown must meet the require-
ments of the safety function, with regard to reaction times for example.
} The drive controller must evaluate the same incremental/sincos signals from the encoder
for control as are processed by the safe evaluation device (important on encoders with
combined analogue/digital interface).
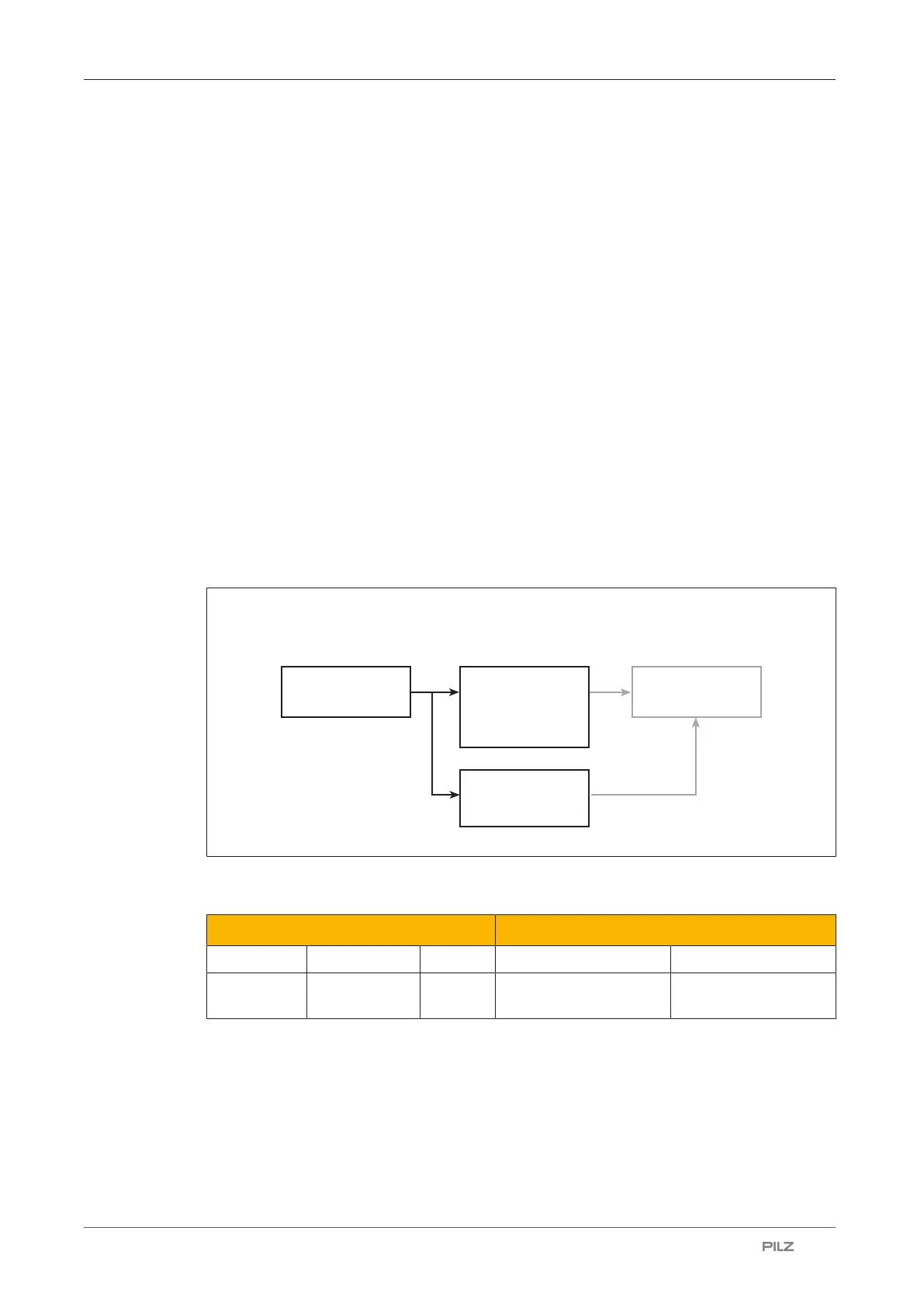
13.3.5.3 Safety-related architecture
Sensor
non-safe encoder
Actuator
SRP/CS
Actuator
SRP/CS
Sensor
PNOZ s30
Logic
+
Diagnostic
SRP/CS
Logic
Drive Control
Diagnostic
To calculate the safety function you will need the following data for the "sensor" subsystem
and "PNOZ s30" subsystem:
Sensor PNOZ s30 subsystem
Category MTTFd DC Operating mode PFH (1/h)
2 Manufacturer-
specific
90 % Monitoring
1 encoder
2,88E-08

 Loading...
Loading...










